XP-53 Peregrine (RC Plane) 3D Printer Model
The file 'XP-53 Peregrine (RC Plane) 3D Printer Model' is (stl,stp,out) file type, size is 13.3MB.
The file 'XP-53 Peregrine (RC Plane) 3D Printer Model' is (stl,stp,out) file type, size is 13.3MB.
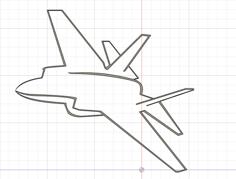
Edit: Added a screenshot of the new working model of the plane. I'll be working on it some more and I'll eventually print it in the coming weeks.
The XP-53 "Peregrine" is a functional RC plane. I have built an almost fully assembled model of the plane (minus the parachute assemblies), however the plane is not quite finished. I have not flown the plane yet, as I am waiting for summer to come around and I'm trying to find a nice wide open space to fly it.
I don't claim to be an expert in the field of aerospace, and to be honest I had no idea what I was doing when I started this project a little over a year ago. However, I have done quite a bit of research and have learned a fair bit about how planes work in that time. This learning curve is the reason why some parts of the plane might not appear super aerodynamic (like the FPV camera holder), and why some of the design decisions I made might not be the best.
I don't know for certain if it will fly, but I will update this page once I get the chance to give it a test flight. I have put an STL of the full assembly of the plane into Autodesk Flow to find the theoretical drag coefficient (about 0.3 currently; mediocre for a plane but not bad as far as modern cargo vans go :D) as well as the actual drag that the plane experiences as varying speeds and angles of attack. I also created a Google Sheet and used it to auto-run plenty of physics equations relating to the thermodynamics of air, theoretical drag, theoretical lift, and the terminal velocity of the plane with a parachute deployed. I also used a small 1000 g weight scale to measure the static thrust of my working prototype of the Peregrine. Static thrust comes out to be about 5.7 Newtons. According to that, data from Autodesk Flow, and my own calculations, the plane should have more than enough power to fly at speeds of over 50-60 miles per hour minimum. In fact, my calculations show that the plane has a theoretical top speed of just over 100 miles per hour, although I think that 80 or 90 is more realistic. Here's a general run-down of the stats of this plane:
Total Mass: ~1.63 kg Static Thrust: 5.7 N Thrust to Weight Ratio: 0.357 Top Speed: ~100 mph Cruising Speed (3 degree AoA): 48.6 mphThe plane also has a few contingency plans built into its design for use in case something goes horribly wrong mid-fight. The first contingency plan (Plan B) is to use the self balance mode of the 6-axis gyro in the plane. This will force the plane to try and auto-level itself to prevent crashing. If this doesn't work for some reason, Plan C is the last resort to save the plane from a brisk meeting with the ground (or water, that would be worse). Plan C involves jettisoning a parachute from one of two parachute capsules atop the plane, effectively dropping the plane's terminal velocity to below 10 mph. An impact at this velocity may still damage the plane, but it is certainly better than a 50 mph impact (that impact would have 25 times the amount of kinetic energy behind it!).
Also, the reason I named this plane the XP-53 is to sort of pay tribute to the XP-54, which is a real life plane made by Vultee in the early 1940's for the U.S. Air Force. The XP-54 is structurally similar to my plane, and has its engine in the same position as on mine. Funnily enough, I actually didn't design this plane to be similar to the XP-54, as I had no idea the XP-54 even existed until a few days ago (I've been working on this plane for a lot longer than that). Here's a link to the XP-54's Wikipedia article if you're curious as to what it looks like.
https://en.wikipedia.org/wiki/Vultee_XP-54
I have also included both STL and STEP files of every part and for the full assembly of the plane to allow for both ease of printing and ease of modification.
| aero_lever.stl | 243.2KB | |
| aero_lever.stp | 115.0KB | |
| camera_holder.stl | 33.1KB | |
| camera_holder.stp | 38.5KB | |
| chassis_front_2.stl | 949.9KB | |
| chassis_front_2.stp | 847.6KB | |
| chassis_rear_2.stl | 1.1MB | |
| chassis_rear_2.stp | 1.1MB | |
| chute_barrel.stl | 786.9KB | |
| chute_barrel.stp | 555.4KB | |
| chute_cover.stl | 862.9KB | |
| chute_cover.stp | 233.1KB | |
| chute_servo_cover.stl | 186.2KB | |
| chute_servo_cover.stp | 127.0KB | |
| dorsal_fin.stl | 406.0KB | |
| dorsal_fin.stp | 377.4KB | |
| dorsal_stabilizer.stl | 54.2KB | |
| dorsal_stabilizer.stp | 25.4KB | |
| elevator_1.stl | 157.4KB | |
| elevator_1.stp | 56.4KB | |
| elevator_2.stl | 29.4KB | |
| elevator_2.stp | 37.8KB | |
| elevator_3.stl | 26.7KB | |
| elevator_3.stp | 27.0KB | |
| extension.stl | 859.1KB | |
| extension.stp | 335.8KB | |
| extension_cover_top.stl | 877.2KB | |
| extension_cover_top.stp | 280.9KB | |
| front_wheel_holder_f.stp | 40.8KB | |
| front_wheel_holder_m.stp | 42.2KB | |
| lg_front_1.stl | 290.4KB | |
| lg_front_1.stp | 119.7KB | |
| lg_front_2.stl | 22.5KB | |
| lg_front_2.stp | 36.3KB | |
| lg_front_aero_cover.stl | 1.7MB | |
| lg_front_aero_cover.stp | 223.0KB | |
| lg_front_new.stl | 1.1MB | |
| lg_front_new.stp | 531.7KB | |
| lg_rear_1.stp | 136.6KB | |
| lg_rear_2.stp | 172.1KB | |
| nose_cone.stl | 1.3MB | |
| nose_cone.stp | 576.6KB | |
| plane_2_asm.stp | 10.8MB | |
| plane_2_dont_print_this_file.stl | 5.5MB | |
| rear_cone.stl | 2.6MB | |
| rear_cone.stp | 461.5KB | |
| rear_fin.stl | 97.1KB | |
| rear_fin.stp | 95.9KB | |
| rear_fin_elevator.stl | 47.7KB | |
| rear_fin_elevator.stp | 37.5KB | |
| rear_lg_new.stl | 152.9KB | |
| rear_lg_suspension_1.stl | 855.4KB | |
| servo_brace.stl | 26.3KB | |
| servo_brace.stp | 44.6KB | |
| stabilizer_cover_left.stp | 32.8KB | |
| stabilizer_cover_right.stl | 53.2KB | |
| std.out | 258.0B | |
| strut_bottom.stl | 587.6KB | |
| strut_bottom.stp | 273.5KB | |
| strut_top.stl | 583.6KB | |
| strut_top.stp | 260.1KB | |
| tire_tpu.stp | 13.7KB | |
| wheel_cover_f.stl | 88.7KB | |
| wheel_cover_m.stl | 58.3KB | |
| wing_1.stl | 372.9KB | |
| wing_1.stp | 286.7KB | |
| wing_2.stl | 186.5KB | |
| wing_2.stp | 48.0KB |