Versatile And Durable Robotic Arm Gripper 3D Printer Model
The file 'Versatile And Durable Robotic Arm Gripper 3D Printer Model' is (stl) file type, size is 138.1KB.
The file 'Versatile And Durable Robotic Arm Gripper 3D Printer Model' is (stl) file type, size is 138.1KB.
This gripper was designed with two goals:
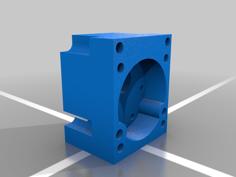
Provided version is for small 8g servo ES08 from EMAX.
But you can easily adapt it to almost any servo you have, just by printing different holder and servo rod adaptor.
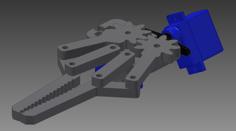
Front gripper plates are designed to mount any jaws you want.
There is enough material, so you can simply drill some holes and mount there different type of "fingers".
One of the possible applications is on the photo: soft jaws from PE tubes for gentle grip.
Easy peasy. No brim, no supports. Print it from PET-G with any quality (.2 layers are fine),
but always use 100% infill (there is no point in saving couple of grams of material).
You will need four small B688ZZ bearings.
Bolt everything together with M5 bolts, nuts and washers and some wood screws.
As you can see on picture, there is a plenty of room for using any fasteners you'll find in drawer.
First prototype was used in pretty rough conditions for over a year. It survived children, cats and countless crashes and falls form workbench.
I already burned 2 servos (those cheap chinese servos has really limited lifespan),
but the gripper itself does not show signs of wear.
If you need something really durable, this little beast is just for you.
Found it useful? Drop me a line about your remix or thoughts about future improvements.
This accessory is part of the Tortuguita project.
Tortuguita is open source, hackable, easy to build tracked robot kit. Take a look at it.
| central_part.stl | 185.0KB | |
| left_bottom.stl | 342.8KB | |
| left_top.stl | 304.7KB | |
| right_bottom.stl | 342.8KB | |
| right_top.stl | 304.7KB | |
| servo_holder.stl | 63.8KB | |
| servo_rod_adaptor.stl | 26.3KB |