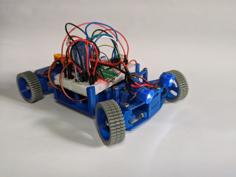
A robot i made. It is nor very stable on its two wheels, but quite funny to navigate
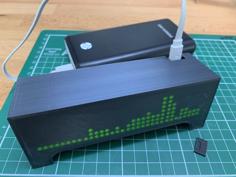
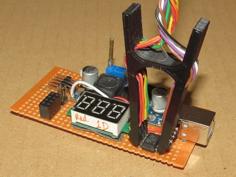
Of corse you can use whatever you want to control your robot. I used a nodemcu, which allows you to send commands over wifi.
The robot is powered by a simple battery bank.
I used two 28byj-48 stepper motors.
| batteryPackClamp.stl |
| nodeMcuRobot.zip |
| robotSocket2.stl |
| wheel.stl |
| wheel_mirror.stl |