Two Jaw Self Centering Parallel Gripper 3D Printer Model
The file 'Two Jaw Self Centering Parallel Gripper 3D Printer Model' is (stl,STL) file type, size is 3.4MB.
The file 'Two Jaw Self Centering Parallel Gripper 3D Printer Model' is (stl,STL) file type, size is 3.4MB.
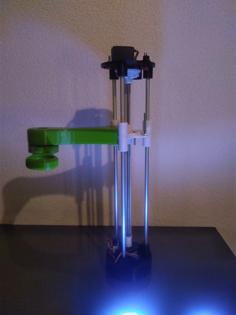
Two Jaw Self Centering Parallel Gripper
Two racks and a pinion open and close the gripper by rotating a handle connected to the pinion. An additional set of guides keep the tooling plates from rotating. 180 degrees of rotation opens the grippers 2.5".
Instructions:
Required Fasteners:
To mount the tooling plates to the guides.
(4X) M3 x 10mm Lg. Socket Head Cap Screws
(4X)- M3 Hex Nuts
To mount the tooling to the tooling plates. (optional)
(8X) M3 x 6mm Lg. Socket Head Cap Screws
(8X)- M3 Hex Nuts
Note: A set of gripper tooling is provided but additional tooling made for your application can be mounted utilizing the M3 mounting nuts on the tooling plate.
The updated version will operate with a stand hobby servo.
| GRIPPER_BASE_PLATE.stl | 921.5KB | |
| GRIPPER_GEAR.stl | 899.8KB | |
| GRIPPER_GUIDE_PLATE.stl | 862.6KB | |
| GRIPPER_GUIDE_ROD.stl | 40.8KB | |
| GRIPPER_HANDLE.stl | 283.0KB | |
| GRIPPER_RACK.stl | 198.2KB | |
| GRIPPER_SWIVEL.stl | 409.2KB | |
| GRIPPER_TOOLING.STL | 5.7MB | |
| GRIPPER_TOOLING_PLATE.stl | 358.9KB |