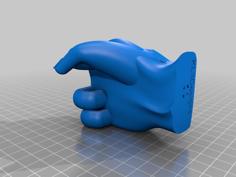
A concept of a joint without any additional elements for prosthetic fingers. Still has some technological issues and a questionable service time.
It's based on torsion spring, so there's no need any other to return to origin position after bending.
The full straight rotation is limited by space between coils, a little back angle - by a geometrical stopper.
| spring.x_t | 105.1KB | |
| tors-chain.stl | 1.5MB | |
| Tors-joint.stl | 663.2KB |