More about this project in my video:
https://youtu.be/u_ArriXbrR0
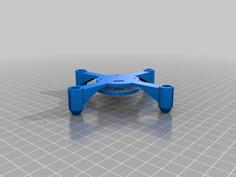
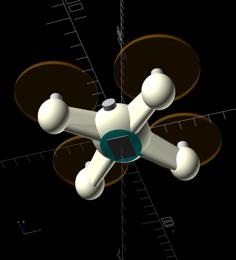
About the Frames :
In my video I talk in detail about the design process, but here I also wanted to add something about the suitable filaments. The truth is that you can 3D print those frames from almost any rigid enough filament. My first designs were printed from simple PETG, and they were flying fine, just requiring a bit of running to deal with the vibrations. I suspect that PLA would work as well as long as you don't crash or overheat any component. But PLA can soften by simply being exposed to sun, so I wouldn't risk it. My go to filaments would be Carbon PETG or as I said in the video Carbon Fiber Nylon PA12. The letter one is super impressive. During the competition we built a functional slingshot to launch my drones, and let’s just say the first few shots were not successful. But the little 3D printed drone took the beating without any structural damage. I bet if it was something more brittle like PLA it would break on first impact. Also I was surprised to find out that the Carbon PA12 frame was 5 grams lighter than the CNC cut pure Carbon Fiber. The carbon fiber is of course more durable, but I cannot say any bad words about the Carbon Nylon.
Drone Parts List:
1x SpeedyBee F405 Mini BLS 35A 20x20 Stack https://www.speedybee.com/speedybee-f405-mini-bls-35a-20x20-stack/
1x SpeedyBee Nano 2.4G ExpressLRS RX https://www.speedybee.com/speedybee-nano-2-4g-expresslrs-elrs-receiver/
1x BetaFPV ELRS Micro TX Module 2.4G https://betafpv.com/products/elrs-micro-tx-module?variant=39652634722438
4x Darwin 1104 4300KV Brushless Motor https://darwinfpv.com/products/darwin-1104-4300kv-brushless-motor?variant=41360594895023
1x Walksnail WS-M181 GPS
1x XT30 male and female connector
4 propellers set, can be anywhere from 2,5 to 3,5 inch (I used the HQ Prop T3x1.8x3 Tri-Blade 3” in the video, and also HQ PROP T3.5X2.2X2 BI-BLADE 3.5" for better efficiency)
3S Battery Pack that can deliver around 15A (I used DIY Sony VTC5A 3S Packs)
FlyFishRC Battery strap 15x250mm (Can be any brand, just similar dimensions)
1x GEPRC ELRS Nano Receiver 868Mhz (It can be BetaFPV too, the brand doesn't really matter)
1x BetaFPV ELRS Micro TX Module 868Mhz
Additional WS2812B 5V (12cm Strip, 7 LEDs)
Additional camera RunCam Thumb Pro W
Couple additional notes
-In the video I used two GPS modules, the first one was FOXEER M10-Q120 GPS and it was about 2 grams lighter than Walksnail, but I found its performance to be worse so that's why I swapped it.
-The SpeedyBee F405 FC is a great flight controller, but if you want better performance and more functions like Log analysis, Auto Tune and most important LUA Scripts for stuff like LED control I would recommend H7 Flight Controllers. For V2 version of this drone I will probably use Holybro Kakute H7
-The SpeedyBee 4in1 ESC is also working fine, but it shuts down at around 6.4V so it's not suitable for 2S Li-Ion battery packs. But in my opinion this drone is much better suited for 2S packs so I will probably swap it for a different model for the V2 version.
-The DarwinFPV 1104 motors also performed well, but I feel like they are struggling a bit once you get to the 250g barrier and above. The competition drones I built used stronger GEPRC GEP-GR1106 4500kv motors, they are a few grams heavier, but I felt like they offered a better flight experience.
- There is quite a big difference in weight between various 18650 cells which is really important for building a sub 250g quad. For example, the Sony VTC5A cell weighs around 48 grams, while the VTC5 weighs just 44 grams. This can result in almost 12 grams difference on 3S packs. The drone consumes around 5A in flight anyway, so I would recommend the a VTC5 cells for lightest possible 18650 Li-Ion pack, and VTC6 for a higher capacity pack.
About the ExpressLRS AirPort Mavlink Telemetry:
To have both ELRS Airport Mavlink Telemetry and Standard ELRS RC link I used two pairs of ExpressLRS TX and RX modules. In the video I used the 2.4G for Telemetry and 868Mhz for RC. And the reason for this is to make the telemetry parameters download faster. On the 2.4G and quite high 19200 baud rate the connection procedure took only about 30 seconds, but as shown in the video the range is not the best. It could also be due to my bad antenna placement, but I think the 2.4G with high baud rate is simply not the best for long range. In the past I used to fly the exact opposite setup, 2.4G for RC and 868Mhz for telemetry and the range was definitely better. The only downside was the long parameters download time, more than two minutes which was quite annoying to work with. Now for the really long range I would like to try the Radiomaster Bandit ExpressLRS system with whooping 500mW telemetry power. Also this video was in development for a solid few months, and during this time the new ELRS telemetry feature called Mavlink-RC was released. It can use only one pair of TX and RX to achieve both RC control and Telemetry, and from what I read it is more stable than the AirPort. This will definitely be my main focus from now on, but the Airport Telemetry can still be useful.
You can see more footage about this project on my Patreon:
https://www.patreon.com/BasementCreations
Some Useful Links
ExpressLRS AirPort Setup Guide:
https://www.expresslrs.org/software/airport/
Arducopter Setup Guide:
https://ardupilot.org/copter/docs/initial-setup.html
My RC radio software:
https://github.com/OpenI6X/opentx/releases/tag/openi6x-1.11.1