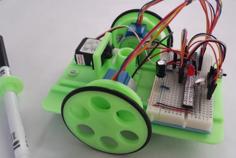
Redesigned all parts so no screws, bolts or glue is needed. Servo's just fit tight in. Maintained the screwholes for the servo's wich you still can use if you want to. Used a battery case with switch that slides in from te back. Designed smaller servo handle to fit in the servo holes (you can print the femur without any rafts and it will fit straight in without removing anything) . Made to help plates: 1 for the nano board and 1 for the DCDC if you don't want to glue the boards straigth on the top. Followed these instructions: https://robotlk.com/how-to-make-3-in-1-spider-robot-quadruped-arduino-nano/ but you can also follow the instructions from the origin of this remix and only replace tibia, femur and coxa. The two body parts are 5mm wider to fit in the battery case I used. Have fun!
| SF-cable_clamb.stl | 2.6KB | |
| SF-coxa_l.stl | 71.9KB | |
| SF-coxa_r.stl | 71.9KB | |
| SF-DCDC_plate.stl | 15.0KB | |
| SF-femur.stl | 137.8KB | |
| SF-handle_clamb.stl | 2.6KB | |
| SF-lower_body.stl | 136.4KB | |
| SF-nano_plate.stl | 31.1KB | |
| SF-servo_handle.stl | 31.7KB | |
| SF-tibia_l.stl | 67.6KB | |
| SF-tibia_r.stl | 67.6KB | |
| SF-upper_body.stl | 182.6KB |