saw the original idea and really liked it, but the issue is i found moving sideways wouldn't work too well and would be too fast, due to the axis number for that being too high. saw fdmakaras, really liked it. found it wouldn't work at all due to the code not working for 3d software
i tweaked things around, and got things working out a bit better. does it work? yes! well? i won't lie it's got some bugs! but it's not super expensive to make, and it's open so anyone can modify it as they see fit
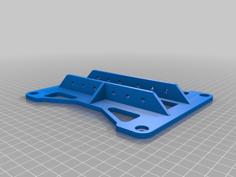
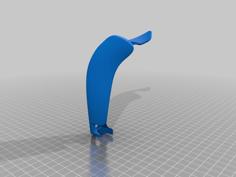
this is a remix of 2 peoples projects, and likewise the code is a remix 3 other people editted. i only take credit for the palmrest and the new base, which even then were from the original by shiura and would not be possible without them sharing their project.
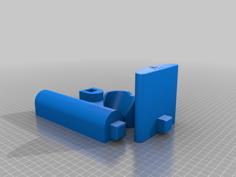
this remix relies on parts FROM FDMAKARA.
-4 analog joystick sensors with board
highlighted green text you can change however, works as written
highlighted blue text from what I understand are the multipliers for the axis. (For example, all of the X axis has been set to -3. increasing this to -6 will double the zoom in and out speed. decreasing it to -1 will decrease the zoom in and out speed)
highlighted red code is the axis of each individual joystick, as followed: X1, X4, X3, X2, Y1, Y4, Y3, Y4
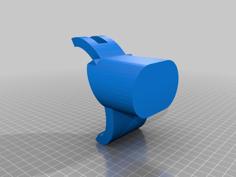
i realized when i was assembling the joystick, the set up could be flipped as well (I was holding the "knob" upside down, and realized that could be the base, and the "shaft" the part of the mouse to rotate) which could provide space for adding buttons onto the design.
| 30Tilt.SpaceMush.Base.stl | 110.3KB | |
| 30Tilt.SpaceMush.ShaftAlt.stl | 7.0MB | |
| 30Tilt.SpaceMush.WristRest.stl | 6.2MB | |
| 4JoystickMush3DConnexion.ino | 5.2KB | |
| FDMAKARAS.BallJoint.stl | 356.3KB | |
| FDMAKARAS.Knob4.stl | 1.3MB | |
| FDMAKARAS.Shaft4.stl | 476.5KB | |
| INSTRUCTIONS.rtf | 1.7KB |