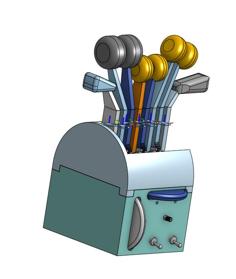
Robots, so fascinating...
This is a robot with the ability to learn a sequence, and repeat ad infinitum.
You can control it, in live mode, for a distance handling.
Or, record a sequential movements and play it as needed.
As you can see, the Serv-Arm project is in two parts:
The Armaster - controller.
The Serv-Arm - Controlled.
NB:English is not my native language ,
I did my best to avoid letting mistakes. if , however, I missed some , you would be kind to inform me in order I can correct them.
A nice contribution made by Marcel_X can be found here and here:
| 2_x_Ctrl_levier_V3.stl | 1.3MB | |
| 8_x_Half-AxePot.stl | 288.2KB | |
| Avant_Bras.stl | 3.7MB | |
| base.stl | 8.2MB | |
| Base_Ctrl_V3.stl | 5.9MB | |
| Base_Epaule-Rotate_V3.stl | 3.8MB | |
| Base_Top_Ctrl_V3.stl | 9.8MB | |
| Bras.stl | 235.8KB | |
| Ctrl_Avant_Bras.stl | 1.7MB | |
| Ctrl_Bras.stl | 1.4MB | |
| Ctrl_Epaule.stl | 946.9KB | |
| Ctrl_Renfort_Bras.stl | 2.8MB | |
| Cube_10mm.stl | 35.1KB | |
| Epaule-Rot_V3.stl | 2.6MB | |
| Logo.stl | 743.1KB | |
| pente.stl | 162.0KB | |
| pente_pied.stl | 457.7KB | |
| pente_pied1.stl | 458.9KB | |
| Pince_V4.stl | 6.7MB |