Rover Platform 3D Printer Model
The file 'Rover Platform 3D Printer Model' is (stl) file type, size is 1.6MB.
The file 'Rover Platform 3D Printer Model' is (stl) file type, size is 1.6MB.
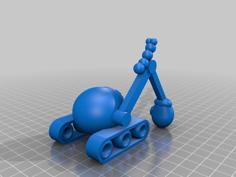
This a rover platform that you can assemble choosing among many blocks that fit in the same mounting points, so you can adapt the design to what ever fits your needs the better.
I thought it to be as symmetric as possible, allowing you to reuse many parts in different spots, for example, the front and back shells have the same mounting points, allowing you to print the Shell - RPi Camera for the front, and the Shell - Blank for the back part. Unless you want a camera in the back too. You could also print the Shell - Switch for the back, to control the power source of your rover.. Your imagination is the limit.
I am designing this in Sketchup, these files will be uploaded too, in case you want to design custom blocks yourself.
NOTE: Please let me know if you find issues on any of the parts, and if you would like me to create a specific block for any hardware you think could be useful.
InnerTrackFrame - DCMotor v0.3.stl
CenterTrackFrame v0.3.stl
OuterTrackFrame v0.3 .stl
Shell - Blank v0.2.stl
Shell - Switch v0.1.stl
Shell - RPi Camerav0.3.stl
Shell - RPi Camera Support v0.3.stl
Track v0.1.stl
Cog - Drive v0.1.stl
Spindle - DC Motor v0.3.stl
NOTE: I use aaf.li to manage my links, this allows me to:
- Use shorter links
- Change them in only one place if I see they are broken
- Have a nice dashboard with statistics on their performance
- And all this for free
| CenterTrackFrame_v0.3.stl | 441.3KB | |
| Cog_-_Drive_v0.1.stl | 5.8MB | |
| Cover_-_Blank_-_v3.stl | 85.3KB | |
| Explosion.stl | 8.1MB | |
| InnerTrackFrame_-_DCMotor_v0.3.stl | 733.5KB | |
| OuterTrackFrame_v0.3_.stl | 187.1KB | |
| Shell_-_Blank_v0.2.stl | 289.5KB | |
| Shell_-_RPi_Camerav0.3.stl | 219.4KB | |
| Shell_-_RPi_Camera_Support_v0.3.stl | 136.1KB | |
| Shell_-_Switch_v0.1.stl | 323.8KB | |
| Spindle_-_DC_Motor_v0.3.stl | 35.9KB | |
| Track_v0.1.stl | 246.6KB |