RoboticArm As SortingPlant – Roboticarm Organizes Colors … 3D Printer Model
The file 'RoboticArm As SortingPlant – Roboticarm Organizes Colors … 3D Printer Model' is (stl) file type, size is 547.8KB.
The file 'RoboticArm As SortingPlant – Roboticarm Organizes Colors … 3D Printer Model' is (stl) file type, size is 547.8KB.
First run
https://youtu.be/zmYEERLlv1g
This is an extension for my roboticarm V1. Now the arm can see and feel.
It has a colorsensor with an sortingstand and 3 sensorswitches into the gripper.
The arm organizes colors it can see nearly 3000 different colors. but I have only 6 colors to organize...
This are the needed things for the roboticarm sortingplant:
1 Roboticarm V1
1 Stand with the colorsensor-mount
4 Boxes
16 cylinders 4 red, 4 blue, 4 green, 4 other colored cylinders (orange, white, yellow, BUT NOT BLACK).
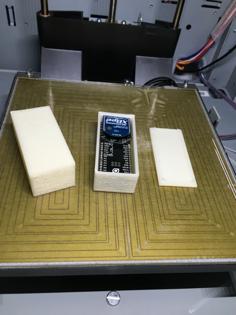
1 TCS230 Color Sensor for Arduino
1 switch on/off
3 SMD microswitches
one gripperpart (leftGripperpart) of the claw now holds up to three microswitches as a feedbacksensor for the grippingforce.
CONSTRUCTION INFOS COMING UP SOON ....
| cylinder_30x40.stl | 118.9KB | |
| SortBox.stl | 654.1KB | |
| sortBoxFloor.stl | 131.1KB | |
| sortBoxWall_1.stl | 132.4KB | |
| sortBoxWall_2.stl | 126.9KB | |
| sortStand.stl | 884.1KB | |
| SortStandFrontFunnelWall.stl | 95.7KB | |
| sortStandLowerLeftWall.stl | 323.8KB | |
| sortStandLowerRightWall.stl | 191.1KB | |
| SortStandRearFunnelWall.stl | 73.9KB | |
| sortStandRollOut.stl | 145.0KB | |
| sortStandSensorMount.stl | 116.5KB | |
| sortStandSideWallSupporter.stl | 52.4KB | |
| sortStandUpperLeftWall.stl | 125.3KB | |
| sortStandUpperRightWall.stl | 123.1KB | |
| S_Claw_L_Gripper.stl | 3.1MB |