Once again props to LimpSquid for the original design!
Jon's Upgrade #2 - Arm strength and stability
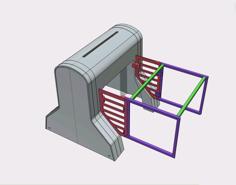
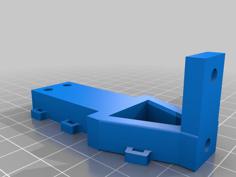
In this modification, I've changed the "base servo mount.stl" file, to allow for the installation of ball bearings, that the robotic arm can ride on, and transfer the weight to. This reduces the stresses on the servos spindle, and makes the arm much more stable. I tried to make it easy for the people who are printing this arm, and already bought the 8mmx16mm ball bearings, and will likely have extras.
You will need:
8mm x 16mm x 5mm bearing, 688zz (6x)
A little sandpaper (120-220 grit) or a file
Print the provided STL file 2x. While printing, you can use the sandpaper to smooth the bearings contact surface of the arm on each side. When these parts finish printing, you might need to sand inside the grooves where the bearings sit, to ensure clearance for the bearings to spin without much drag. A tiny bit of drag isn't a bad thing though, as it helps keep the arm from being as floppy when its powered down.
| Base_servo_mount-Jons-bearing-mod.skp | 843.8KB | |
| Base_servo_mount-Jons-bearing-mod.STL | 88.9KB |