Robotic Arm Turned Into A 3D Printer (Inverse Kinematics) 3D Printer Model
The file 'Robotic Arm Turned Into A 3D Printer (Inverse Kinematics) 3D Printer Model' is (STL,gcode,docx,zip) file type, size is 1.8MB.
The file 'Robotic Arm Turned Into A 3D Printer (Inverse Kinematics) 3D Printer Model' is (STL,gcode,docx,zip) file type, size is 1.8MB.
New Update 2021 : I added Endstop, Homing & Calibration
Marlin update 2021 in "Thing files"
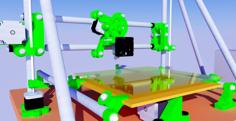
Here is my re-mix on the excellent F.Tobler robot arms. Most of the files are the same :
https://www.thingiverse.com/thing:1718984
I use Arduino Mega 2560 with Ramps 1.4 & Marlin Firmware with Inverse Kinematics (I.K.) included.
https://www.youtube.com/watch?v=xLW9dskR66w
Inverse Kinematics is included in marlin_main.
New : https://youtu.be/LpSv128tduk
New : https://youtu.be/t-SQj9KiAq8
New : https://youtu.be/qd-OGas5kDQ
New : https://youtu.be/-mjkH2vtYh0
New : Fully compatible with (see instructions) : https://www.20sffactory.com/robot/resource
Just add a "macro" in Pronterface or Repetier with name "Home" :
M84
G28 X Y
G95
G1 F1000 X-52 Y-27
G94
G93 X90 Y0 Z0
G1 Z0
| base_w_hole.STL | 1.6MB | |
| cube.gcode | 112.0KB | |
| Extruder-Z.STL | 64.2KB | |
| Help_File.docx | 1.1MB | |
| MarlinArm2.zip | 288.3KB | |
| spur_gear_din2.STL | 84.8KB |