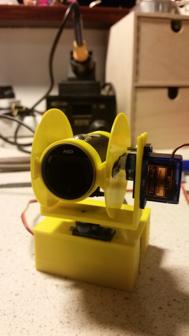
Robotic Arm 3D Printer Model
The file 'Robotic Arm 3D Printer Model' is (stl) file type, size is 266.6KB.
The file 'Robotic Arm 3D Printer Model' is (stl) file type, size is 266.6KB.
FIrst, here are my social networks
Twitter/Instagram: @SuperRachu
Youtube: www.youtube.com/watch?v=DzUxRKjmcz8
This model is based on Eezybot: http://www.thingiverse.com/thing:1015238
but with some improvements. One is that the base of the robot uses a stepper motor instead of a servo. Other changes are the situation of the servos in the arm.
Required material:
This is the code I've used, but you can get you own code instead: https://github.com/rachuism/Programacion_brazo/blob/master/Programacion_brazo.ino
For the moment it's a prototype, I've found some errors in the design I'll try to fix as soon as posible. Anyway this is an open source project so you can take the advantage of it and contribute to the community. Thank you for being patient.
| Base_prueba5.stl | 348.1KB | |
| Brazo_tronco4.stl | 69.1KB | |
| Engranaje_apoyo2.stl | 69.7KB | |
| Engranaje_servo.stl | 42.7KB | |
| Eslabon_secundario2.stl | 87.4KB | |
| Pinza_derech3.stl | 33.5KB | |
| Pinza_izq2.stl | 40.9KB | |
| Plataforma_prueba5.stl | 181.3KB | |
| Soporte_servo.stl | 55.9KB |