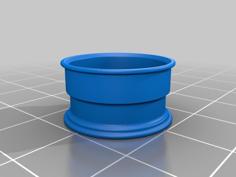
Simple industrial design of a robot wheel. Ideal for small robots.
I designed it for my balancing robot when I realized factory made wheels are too expensive.
Outer diameter: ⌀65mm
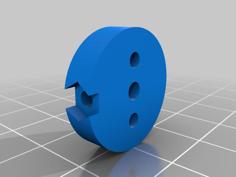
Shaft: ⌀4mm (⌀5mm should be also good).
Wall thickness: 3mm
You can stick encoder pattern on the back if you like.
| Robot_wheel_A2.STL | 114.0KB |