Robot Dog 3D Printer Model
The file 'Robot Dog 3D Printer Model' is (stl,HEIC) file type, size is 17.2MB.
The file 'Robot Dog 3D Printer Model' is (stl,HEIC) file type, size is 17.2MB.
Code for this project, you can find here:
https://github.com/Marcel3245/Robot-dog/
To know more about this project, I recommend to visit:
https://marcelborkowski.com/post/robot-dog/
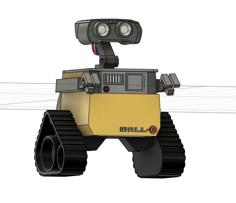
Let's start from the beginning, with the 3D model. My main goal was to create a robot the size of a small dog, with easily replaceable parts and straightforward assembly. This meant using as few screws as possible. In the end, I believe I achieved these three objectives. Overall, assembling the robot requires only 36 screws (not including the screws provided in the servo kit). The leg offers three dimensions of movement with a reliable, rigid body. The robot consists of 21 parts: each leg has 8 parts, and the body is built from 3 parts (with an optional top cover extension). Each leg uses 3 servos. For more details on leg design, I recommend reading my previous post.
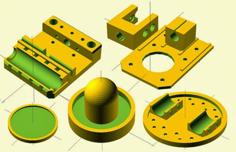
For the body, I designed just three parts to simplify assembly: the "Back Bumper," "Front Bumper," and "Body." Assembling these three parts requires only 8 M3x20mm screws.
| Back-bumper.stl | 249.9KB | |
| Body.stl | 1.8MB | |
| Calfs.stl | 6.0MB | |
| Cover.stl | 562.8KB | |
| Feet.stl | 3.7MB | |
| Front-bumper.stl | 491.0KB | |
| IMG_4986.HEIC | 1.7MB | |
| Robo-dog.stl | 23.5MB | |
| Shoulders-back.stl | 847.0KB | |
| Shoulders-front.stl | 846.0KB | |
| Thighs-lower.stl | 564.9KB | |
| Thighs-upper.stl | 712.6KB | |
| Transitions-bottom.stl | 647.0KB | |
| Transitions-top1.stl | 139.1KB | |
| Transitions-top2.stl | 133.7KB |