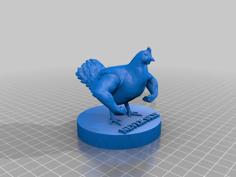
A bipedal robotic chicken. It stands about 7 inches tall; parts are easy to assemble. The wings are connected with a paperclip trimmed to the right length and made permanent with a drop of hot glue on either end. The head is attached with a spring of appropriate size and hot glue. The servos are hot glued underneath body, and legs are then screwed on to servo horns. The hot glue works great, servos stay put and have never moved or fallen off. Make the body, head, and wings as light as possible, but make the legs more dense for stability. I did 10% infill, and 75% for the legs, respectively. Traction for feet is necessary so that it moves forward, you can roughen the feet (sand them), or apply a thin layer of hot glue. There will likely be some trial and error with finding the right amount of traction, but otherwise an easy build.
Components:
Arduino Nano
2 TowerPro SG-92R Mini Servos
2 LED
2 560 Resistor
2 Switch
1 3.7V 240mAh 20C Lipo Battery
http://www.ebay.com/itm/191832481644
1 5V Micro USB 1A 18650 Lithium Battery Charging Board Charger Module
http://www.ebay.com/itm/182244346764
Notes:
I soldered extra wires to Nano, that don't go anywhere, for the purpose of making it look like plumage.
I added some of my code to help others get started. The code works with my build, but will not work with all builds. The traction issue will have to be adjusted in the code based on your own conditions. Surface friction and traction matter quite a bit with a bipedal design.
| body.stl | 48.5KB | |
| head.stl | 26.7KB | |
| legs.stl | 16.3KB | |
| robo_chicken.ino | 4.7KB | |
| wings.stl | 18.4KB |