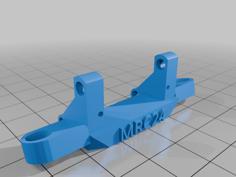
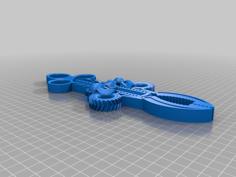
Servo Controlled Robotic Gripper using rack & pinion drive for parallel jaw movement
This is a robotic gripper/jaw that uses a low-cost Tower Pro MG996R servo.
As opposed to some grippers that use a lever action, this directly drives both jaws with a rack and pinion action.
It therefore has slightly more grip than traditional lever grippers and the jaw movement is totally parallel.
It could be easily modified to fit into a robotic arm.
It requires:
1pcs Tower Pro MG 996R servo motor (approx price UK £5 / US $10)
M3x15mm Screws (4 pcs)
M3x10mm Screws (4 pcs)
M3 nuts (8 pcs)
To drive it, I used a servo motor test board and a USB phone charger (2.5A) But you can also use an Arduino.
Servo tester board:
https://www.banggood.com/Servo-Tester-Third-Gear-Switch-With-Indicator-Light-4_2V-To-6_0v-p-1079862.html
Oct 2018 - I've added an alternative JAW that has a wider opening of about 70mm, but obviously only closes to about 22mm. This was for a request to enable the jaw to operate a Rubik's cube of about 57mm Square. Please note that I haven't tested this, so hopefully it'll print and function correctly.
May 2019 - It's been reported that the pinion doesn't have teeth to engage with the motor spindle teeth and just spins on the motor spindle. I checked my version here and the pinion on the motor spindle is rock solid. It shouldn't need teeth and as the teeth on the motor spindle are so small, I doubt whether most low-cost consumer 3D printers could print teeth that would interlock.
The problem is probably because I forgot to mention that the pinion has two different sides. On one side the hole recess is deeper and smaller in diameter to tightly fit onto the motor spindle. On the other side, the recess is shallower and larger to accommodate an M3 screw head. So you need to make sure the tighter deep side is pushed onto the spindle motor.
| Base.step | 162.7KB | |
| Gripper_Base.stl | 133.1KB | |
| Gripper_Jaw.stl | 250.7KB | |
| Gripper_Pinion.stl | 497.1KB | |
| Gripper_Rack.stl | 294.7KB | |
| Jaw.step | 92.5KB | |
| Jaw22-70.step | 3.3KB | |
| Jaw22-70.stl | 505.8KB | |
| Rack.step | 331.0KB | |
| RP_Gripper_MK4_v10.f3d | 1.5MB | |
| SpurGear-14_teeth.step | 1013.5KB |