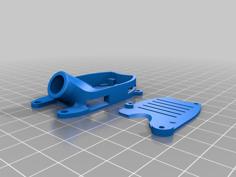
This is the V2 of my first racing quadcopter. This design has had quite a few new changes to the design. The arms have been angled diagonal from the previous tangent design to give you 8" of room between the rotational axis of the motors so you can easily use 5" props without worry.
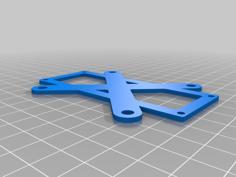
Also added is a retaining clip for your XT60 connector, you install the female end into the top plate from below and clamp it into place using the [battery clip.stl]. You can then simply just plug your battery into the connector from above directly into the top plate for a flush finish and no moving cabling draping over the side of the framework that could possibly be damaged from the props.
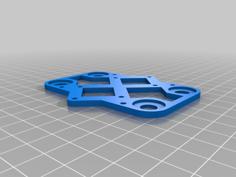
This design also now uses the CC3D fight controller instead of the kk2.1. I have used both and the CC3D is by far the greater board for tweaks and autonomous flight. The lower plate has 4 stand offs which you can install your flight board directly to. Also on the lower plate is a set of 3 slots, these are for cable management if you wish to use them for such or for another use.
The hole diameter on the risers is 4.5mm, this is due to some printers may not print a perfect circle so it gives you an extra 0.5mm to install an M4 bolt through without needing to modify it.
You will need to print -
1 - Lower Plate
1 - Top Plate
1 - Battery Clip
4 - Arms
6 - Risers
Future additions will be side plates that will sit in between the risers and FPV mounting areas. There may be extra also added as I work along with the building stage.
| Arm.stl | 323.4KB | |
| Lower_Plate.stl | 345.4KB | |
| Riser.stl | 54.0KB | |
| Top_plate.stl | 180.0KB | |
| Xt60_clip.stl | 32.9KB |