Quadcopter 3D Printer Model
The file 'Quadcopter 3D Printer Model' is (stl) file type, size is 993.2KB.
The file 'Quadcopter 3D Printer Model' is (stl) file type, size is 993.2KB.
This lightweight minimalist Quadcopter frame is designed for pilots, learning to fly or pushing the limits. This frame is meant to be a stable, 50 cm in diameter and uses readily available (North America) inexpensive light and rigid aluminium window screen extrusions for stiffness. The arms push fit tight into a central hub which is sandwiched between two hub plates. There are slots for Velcro battery straps. The universal motor mounts push fit tight into the end of the arms. The spacing for control boards is 45mm on the main hub and 35mm on the flight control deck. To replace the arms simply loosen the bolts clamping the arms and pull them out of the central hub. The push fit design eliminates hardware and makes the frame lighter. The lighter the frame, the longer the flight time. At a length of 23 cm, the arms weigh only 16 grams (0.56 ounces) each.
These are the electronics I used with this frame. Again, the objective was to keep everything as light as possible:
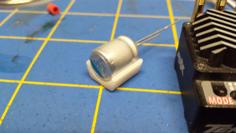
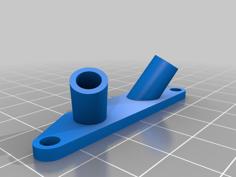
The hextronik motors where chosen because they are very light, inexpensive and have lots of thrust for their size and weight. I have included a motor mount for this motor that allows you to clamp the motor using its 8mm round shaft housing. You can also use your own motors in combination with the universal motor mount. Wires can be run directly through the motor mounts into the hub if you want to hide them for a clean look.
| aluminiumextrusion.stl | 70.8KB | |
| centerpiecehub.stl | 687.3KB | |
| Flight_control_deck.stl | 543.2KB | |
| hubbottom.stl | 1.6MB | |
| hubtop.stl | 1.5MB | |
| landingarm.stl | 87.5KB | |
| motormounthextronik.stl | 348.7KB | |
| motormountuniversal.stl | 347.3KB | |
| Quadassembly.stl | 6.4MB |