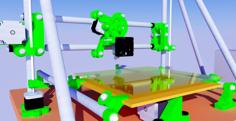
Prodos is the second prototype robot from Project Biped (www.projectbiped.com) whose goal is to create an open source 3D printed dynamically balancing walking robot. Prodos was designed to demonstrate how to coordinate simple limb chain actuation using a microcontroller. It has 8 degrees of freedom (joints) and can perform a simple walking action. The servos used were selected for economy and aren't powerful enough to bear the robot's own weight, so Prodos must be externally supported while it is executing its walking action. See a video of Prodos in action at www.projectbiped.com/prototypes/prodos/walking-analysis
Prodos has the following features:
Uses an Arduino Duemilanove microcontroller
User interface via OLED display and 4 button panel
8 degrees of freedom
Detailed assembly instructions
| all_parts.zip |
| part1.stl |
| part10.stl |
| part11.stl |
| part12.stl |
| part13.stl |
| part14.stl |
| part15.stl |
| part16.stl |
| part17.stl |
| part18.stl |
| part19.stl |
| part2.stl |
| part3.stl |
| part4.stl |
| part5.stl |
| part6.stl |
| part7.stl |
| part8.stl |
| part9.stl |