This is very much a work in progress.
The goal of this project is to create a robot which can "print" designs with Perler Beads automatically. The raw material would be multicolored unsorted Perler beads. The robot would accept a bitmap image with some pixel art you'd like to recreate in Perler beads. It would automatically sort the beads and place them on a grid, ready to iron.
So far...
I have a blog post explaining some of my ideas so far:
http://scanlime.org/2011/02/perler-bead-robot-ideas/
And another post about the color sensor I plan to use:
http://scanlime.org/2011/02/trying-out-the-avago-adjd-s371-q999-color-sensor/
A video of the vibrating funnel in action:
http://www.flickr.com/photos/micahdowty/5407791891/in/set-72157625540465089/
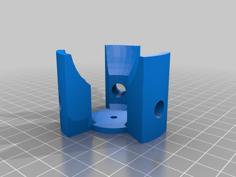
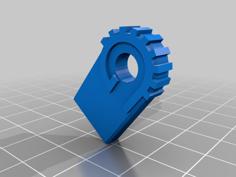
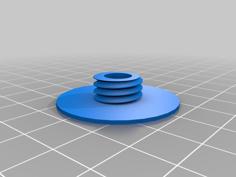
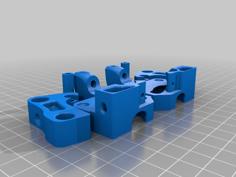
The design comes in several "layers" which stack vertically with standard M4 hardware. First there is a hopper for the raw unsorted beads, then a vibrating funnel which extracts the beads in single-file. Next, a sorter which includes a color sensor, and a servo-driven disc which shuttles the beads back and forth at the right time. This will sit above some kind of X-Y table, which can be rather simple given the low precision requirements.
Currently the first two layers, the hopper and the vibrating funnel, are mostly done. The sorter is more of a sketch than a final design at this point, and it will probably change significantly.
| layer0-hopper.scad | 2.7KB | |
| layer0-hopper.stl | 311.9KB | |
| layer1-funnel.scad | 10.5KB | |
| layer1-funnel.stl | 1.1MB | |
| layer2-sorter-disc.stl | 191.8KB | |
| layer2-sorter.scad | 6.5KB | |
| layer2-sorter.stl | 396.1KB |