This uses an OpenBuilds C-beam and can be used both motorized or not.
I have this up on OpenBuilds website as well which has a nice BOM as part of the project : http://www.openbuilds.com/builds/openbuilds-c-beam-double-slider.3462/
I'm using a Nema17 motor (https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8) with a 5:1 planetary Gearbox.
I added an parts to support geared steppers. The 8mm shaft is shorter then a standard nema17 so I had to offset the motor mount. With a 27:1 geared nema 17 motor (https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8) I can do vertical movements. The parts are :
Motor Plate for geared stepper.stl
herringbone gears for geared stepper.stl
Geared Nema17 Adapter.stl
The End Brackets use 2 608 bearings each (for a total of 4) (https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8) to support a 8mm shaft. I drilled a 3mm hole through the shaft for the herringbone gear & the gt2 pulley.
I'll be updating this in the coming days with a BOM...
Here's a sample video I did with the unit :
https://www.youtube.com/watch?v=lrwcWFf3E8w
and here's a brief overview :
https://www.youtube.com/watch?v=GkWPYcDjcFU
and lastly a lengthy build video
https://www.youtube.com/watch?v=1Y7jwQNCfKA
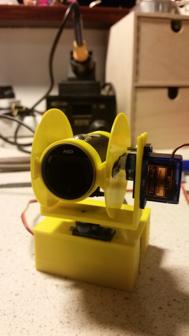
In the video you'll see my pan & tilt head used : http://www.thingiverse.com/thing:1396552
I'm using a miniEngine to control the motion but any controller can be used.
OpenBuild parts
C-Beam : http://openbuildspartstore.com/c-beam-linear-rail/
C-Beam Double Wide Gantry Plate : http://openbuildspartstore.com/c-beam-gantry-plate-double-wide/
Mini V-Wheels : http://openbuildspartstore.com/delrin-mini-v-wheel-kit/
Misc parts
4 608 bearings - https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8)
8mm shaft - I'm using 5/16 steel shaft from home depot
I drilled a 3mm hole through the shaft for the herringbone gear & the gt2 pulley.
gt2 belt - https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8
8 m5 bolts to secure the end plates to the c-beam - I used 25mm ones from http://openbuildspartstore.com/low-profile-screws-m5/
4 m3 45mm bolts for the belt tensioner - https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8
4 m3 nuts - https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8
4 m5 bolts to secure belt tensioner to the gantry plate - I think i'm using 8mm - http://openbuildspartstore.com/low-profile-screws-m5/
zip ties
I redesigned the belt tensioner and am not using this one, http://www.thingiverse.com/thing:1564560. It keeps the belt more inline keeping more teeth in the bite of the pulley while putting less force on all the parts...
If using the motor option :
1 Nema17 motor - https://www.amazon.com/Stepper-Motor-Bipolar-4-lead-Printer/dp/B00PNEQKC0/ref=as_li_ss_tl?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_search_detailpage&linkCode=sl1&tag=wwwbethnchris-20&linkId=567984cba4a8451832c348a6e27167f8) with a 5:1 planetary Gearbox.
Edit ::
I switch controllers to simplify the wiring to a Dynamic Perception NMX. Here's a demo video showing both horizontal & inclined use : https://www.youtube.com/watch?v=K0ec4FYKiSw
I weighed the slider with the pan & tilt head in at just under 10pounds. My camera weighs about 3 pounds... so this setup is capable of lifting 13 pounds fully vertical...
| 50Tooth_GT2_8mm.stl | 1.1MB | |
| belt_tensioner_-_pt1.stl | 66.9KB | |
| belt_tensioner_-_pt2.stl | 39.3KB | |
| End_Bracket.stl | 190.7KB | |
| Geared_Nema17_Adapter.stl | 344.5KB | |
| herringbone_gears_for_geared_stepper.stl | 803.5KB | |
| herringbone_gear_13_tooth.stl | 803.1KB | |
| herringbone_gear_50_tooth.stl | 2.8MB | |
| motor_mount.stl | 87.6KB | |
| Motor_Plate_for_geared_stepper.stl | 88.8KB | |
| Motor_Plate_Support_1.stl | 14.7KB | |
| Motor_Plate_Support_2.stl | 18.4KB |