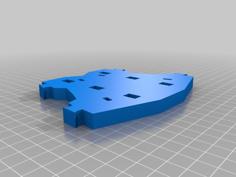
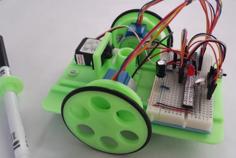
This is a tracked robot I put together based upon the treads from LoialOtter's NerfTank. It uses an ATMEGA328-PU microcontroller and a L293NE 4 Channel Half-H Bridge Driver to drive the motors. It has two bumper sensors which are made out of brass wire and melted into the chassis. The chassis also has adjustable idler wheels to achieve the correct tension on the tracks.
| block.stl | 18.2KB | |
| chassis.stl | 48.1KB | |
| idler_wheel.stl | 35.8KB | |
| motor_wheel.stl | 31.3KB | |
| robot.skp | 1.3MB | |
| tread.stl | 58.9KB |