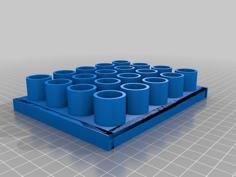
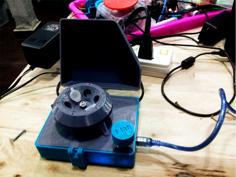
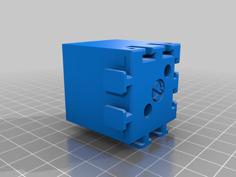
This is a rotor designed to be connected to a 1000kv drone motor (linked to a 3S lipo battery) to spin 8 standard 1.5 ml Eppendorf tubes.
The motor in reality ends up spinning around 8000 rpm when fully loaded, producing a reasonable 5000g of force (https://www.sigmaaldrich.com/US/en/support/calculators-and-apps/g-force-calculator). It ends up using something like 1.5 amps (about 17-18 watts).
Make sure to tighten the bolt that holds the rotor onto the drone motor, or else the rotor will not spin. The motor must be anchored to a solid surface in someway to ensure it itself does not spin. Additionally, start at a low speed and slowly build up, and run any tests behind shielding to avoid injury.
I used a raspberry pi 4 for control, though and microcontroller with analog GPIO output will work. I used a modified version of the code from this tutorial: https://www.instructables.com/Driving-an-ESCBrushless-Motor-Using-Raspberry-Pi/
| Microfuge_rotor.stl | 1.0MB |