Updated!
The old part was 10 times too small. It is now fixed in the files that end with (- mm). I've also added a file with everyone on a platform.
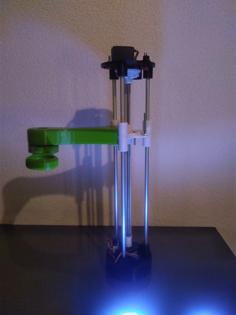
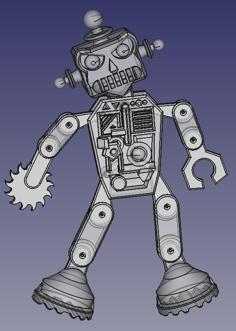
A very small and inexpensive robot. 4 axes plus gripper. Build on 9g micro servo.
The robot can be controlled by remote control, Arduino, etc
I see that there are different diameter on the shaft from the servo. If the gear does not fit I'll fix a new one. Just send me the diameters of the shaft.
See it in action:
http://www.youtube.com/watch?v=_fGNWsP41S0
http://www.youtube.com/watch?v=eWSpKL0VOp8
http://www.youtube.com/watch?v=Qj7jYwfpEMc
http://www.youtube.com/watch?v=Ca4PmYkpcgg
Programming:
http://www.youtube.com/watch?v=7hBvyaEWg5I
Code:
https://github.com/BenTommyE/Micro_robot_RC_servo_IR_remote
| All_i_one_-_mm.stl | 571.2KB | |
| ArmFront_v3.stl | 71.4KB | |
| ArmFront_v3_-_mm.stl | 71.4KB | |
| Arm_v4.stl | 107.3KB | |
| Arm_v4_-_mm.stl | 107.3KB | |
| Arm_w_spring.stl | 123.9KB | |
| Arm_w_spring_-_mm.stl | 123.9KB | |
| Fot.stl | 20.6KB | |
| Fot_for_mm.stl | 20.6KB | |
| Gear_4mm_v5.stl | 22.0KB | |
| Gear_4mm_v5_-_mm.stl | 22.0KB | |
| GripperGear.stl | 25.9KB | |
| GripperGear_-_mm.stl | 25.9KB | |
| Gripper_v5.stl | 48.7KB | |
| Gripper_v5_-_mm.stl | 48.7KB | |
| Sving.stl | 64.3KB | |
| Sving_-_mm.stl | 64.3KB | |
| Sving_v2.stl | 77.6KB | |
| Sving_v2_-_mm.stl | 77.6KB |