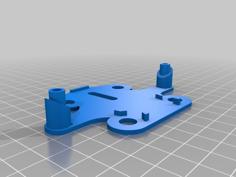
This is my second revision of the micro h-quadcopter I have been designing. I've made a few modifications in order to improve the rigidity and durability of the frame. The arms are still angled outwards at 25 degrees in order to take on loads more axially in a crash. The motor holes are designed for the Turnigy 2900KV motors and the controller board posts are designed for 50mm boards with 45mm hole spacing.
A brief overview and some flight footage of the quadcopter can be found here:
http://youtu.be/9UvrB3ZtkFE
Also, flight footage of KapteinKuk using this frame design:
http://www.youtube.com/watch?v=4bLkVTeQGqs
| Micro_H-Quadcopter.stl | 243.6KB |