Mechanical Gripper May 2019 3D Printer Model
The file 'Mechanical Gripper May 2019 3D Printer Model' is (STL) file type, size is 330.5KB.
The file 'Mechanical Gripper May 2019 3D Printer Model' is (STL) file type, size is 330.5KB.
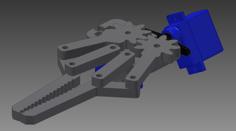
A prototype mechanical gripper. This model serves to demonstrate one method of creating a robotic gripper. Having two connectors to each claw allows the claws to always close parallel to each other. With a handle and a trigger, the user can operate the mechanism without the use of electronics to make for an easy to assemble educational model.
Glue Mechanical_Gripper_Frame_1.STL, Mechanical_Gripper_Frame_2.STL and Mechanical_Gripper_Frame_3.STL together to create the frame with the handle.
Mechanical_Gripper_Arm_Gear_1.STL can be printed as a single piece. However, if warping is encountered, Mechanical_Gripper_Arm_Gear_1_Plus_Base.STL and Mechanical_Gripper_Arm_Gear_1_Plus_Top.STL can be printed instead and glued together.
Use M3 screws to attach the components to the frame.
Slide Mechanical_Gripper_Rack_Circle.STL in through the back of the frame.
Edit 13/06/19: Added frame files with holes for screws for those who want to avoid using glue.
| Mechanical_Gripper_Arm.STL | 21.8KB | |
| Mechanical_Gripper_Arm_Gear_1.STL | 163.4KB | |
| Mechanical_Gripper_Arm_Gear_1_Plus_Base.STL | 89.5KB | |
| Mechanical_Gripper_Arm_Gear_1_Plus_Top.STL | 75.5KB | |
| Mechanical_Gripper_Arm_Gear_2.STL | 80.6KB | |
| Mechanical_Gripper_Claw_1.STL | 97.9KB | |
| Mechanical_Gripper_Claw_2.STL | 97.9KB | |
| Mechanical_Gripper_Frame_1.STL | 57.1KB | |
| Mechanical_Gripper_Frame_1_Holes.STL | 113.4KB | |
| Mechanical_Gripper_Frame_2.STL | 45.0KB | |
| Mechanical_Gripper_Frame_2_Holes.STL | 92.8KB | |
| Mechanical_Gripper_Frame_3.STL | 30.9KB | |
| Mechanical_Gripper_Frame_3_Holes.STL | 82.2KB | |
| Mechanical_Gripper_Rack_Circle.STL | 155.6KB |