MECHANICAL ACTUATOR 3D Printer Model
The file 'MECHANICAL ACTUATOR 3D Printer Model' is (stl,pdf) file type, size is 15.9MB.
The file 'MECHANICAL ACTUATOR 3D Printer Model' is (stl,pdf) file type, size is 15.9MB.
Mechanical Actuator
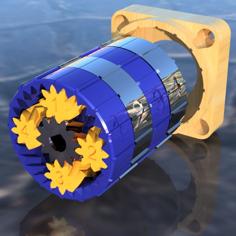
A mechanical actuator is utilized to turn a rotary motion into a linear motion. It has a built in gearbox to reduce the speed of the motor and increase the output force of the actuator. All the components for this actuator are all 3d printable and its constructed similar to an actual mechanical actuator used in industry. It utilizes three stages of gear reduction, a dual roller bearings and a acme screw.
Gear Reduction:
The actuator has three stages reduction utilizing spur gears to achieve a total ratio of a 10.39:1. (Sorry for the odd ratio, I had an even reduction all figured out but my printer was just a little too small to utilize it so I had to reduce the number of teeth on a couple gears to make it fit.) You will notice that the teeth on the gears are larger on the last stage as the torque increases thru the gears.
Stage #1: .577:1 (15 to 26 tooth, module 1)
Stage #2: .417:1 (15 to 36 tooth, module 1)
Stage #3: .4:1 (12 to 30 tooth, module 1.5)
Total Reduction: 10.39:1
Lead Screw:
I utilized a twin lead 5/8” diameter X .375” acme screw. A twin lead screw means that there are actually two threads revolving around the screw to give it more strength. This is a result of how coarse the thread pitch is in ratio to its diameter. A coarse thread was chosen because I wanted the actuator to travel more quickly. I could have chosen a motor with a higher RPM to get the same result but then you run the risk of the spur gears overheating and failing. I found it’s better to run a lower RPM on the gears but utilize a more aggressive thread pitch on the screw.
Bearings:
I utilized twelve 1/8” diameter x 3/8” long dowel pins for the roller bearing on the drive shaft. There are bearing cages to keep the rollers at the proper spacing. Set screws allow you to set the bearings preload to remove any slop in the bearing so a tight tolerances fit is not an issue making it an easy print.
Actuator Speed:
I chose a 1000rpm DC gear motor to drive the actuator, the max linear speed is calculated as shown:
1000 rpm/ 10.39 ratio x .375 = 36 in/min
Printing Instructions:
The files are loaded in the correct orientations for printing. Supports are not required for any of the parts. The max bed size you will need is 120mm x 120mm x 120mm. There are plenty of clearances built into all of the components and they are all pretty easy to print. The only one with any difficulty is the screw since it is so tall and narrow. I printed it directly on the bed but you may choose to use a raft to help hold it vertical.
Assembly Instructions:
This is very easy to assemble, it takes less than ten minutes. Find the PDF that shows the assembly view of the actuator. I have outlined the order of assembly below.
Required Fasteners:
• 1/8” Diameter Dowel Pins X 3/8” lg. - 12X
• M3x.5 Socket Head Cap Screw X 6mm lg. -21X
• M3x.5 Socket Head Cap Screw X 10mm lg. -8X
Purchased Components:
DC GearMotor
PN: A14040300UX0970
Manufacture: Uxcell
Voltage: 24vdc/ 1amp
RPM: 1000 (20-1000 available same gearmotor)
You can find it on Uxcells site or I got mine on amazon for $14: https://www.amazon.com/gp/product/B01MYR3RCR/ref=as_li_ss_tl?ie=UTF8&psc=1&linkCode=sl1&tag=3dprintingwor-20&linkId=19eb089428e4973b9f6976692e572757&language=en_US
or
http://www.uxcell.com/24v-033a-37mm-dia-magnetic-gear-geared-box-motor-1000-rpm-p-598918.html
Thread Inserts
M3x.5mm thread, 5.6mm od x 3.8mm lg. brass
QTY: 16
You can find the threaded inserts on Mcmaster:
https://www.mcmaster.com/#94180a331/=16t62av
Or Amazon: https://www.amazon.com/gp/product/B01MYR3RCR/ref=as_li_ss_tl?ie=UTF8&psc=1&linkCode=sl1&tag=3dprintingwor-20&linkId=19eb089428e4973b9f6976692e572757&language=en_US
Motor Controler
If you are looking for means to control the motor you can find the motor controller and a housing I designed for it the motor here under a previous project: https://www.thingiverse.com/thing:2185266
Demo Video:
https://youtu.be/Q7CDLH05Uoc
Video with the Cover Removed:
https://youtu.be/Rk_fbNDGHfg
| ACTUATOR_SHAFT.stl | 3.6MB | |
| BACK_COVER.stl | 1.6MB | |
| BEARING_CAP.stl | 1.1MB | |
| BEARING_HOUSING.stl | 8.7MB | |
| DRIVE_GEAR.stl | 2.7MB | |
| DRIVE_SCREW.stl | 2.3MB | |
| GEAR_1-2.stl | 2.5MB | |
| GEAR_2-3.stl | 2.5MB | |
| GUIDE_HOUSING.stl | 3.2MB | |
| MAIN_PLATE.stl | 2.8MB | |
| MECHANICAL_ACTUATOR.pdf | 391.6KB | |
| MOTOR_CAP.stl | 4.5MB | |
| ROLLER_CAGE.stl | 2.1MB | |
| SCREW_GEAR.stl | 3.0MB | |
| STAND.stl | 958.5KB |