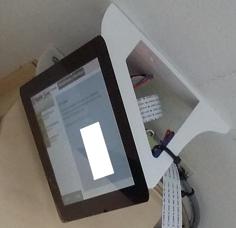
Marvin is a wall (and foot) avoiding robot made from printed parts, an Arduino board, an Adafruit.com motor controller board, 2 motors (from Pololu.com), a distance sensor (from Pololu.com) and a battery clip (Radioshack).
Video of the bot in action: http://www.youtube.com/watch?v=PfaEIkYA8fI
The body, wheels and neck are parts designed specifically to fit what we already had on hand (with the addition of the Pololu parts since we lacked matched motors or a distance sensor).
This bot was created as a mini-project of the MSU robotics group. (Midwestern State University, Wichita Falls, TX)
| MarvinBody.SLDPRT | 143.0KB | |
| MarvinBody.STL | 9.9KB | |
| MarvinCode.zip | 103.8KB | |
| MarvinNeck.SLDPRT | 163.0KB | |
| MarvinNeck.STL | 339.7KB | |
| MarvinWheel01.SLDPRT | 215.0KB | |
| MarvinWheel01.STL | 395.8KB |