Leg-I-Matic 3D Printer Model
The file 'Leg-I-Matic 3D Printer Model' is (stl) file type, size is 280.9KB.
The file 'Leg-I-Matic 3D Printer Model' is (stl) file type, size is 280.9KB.
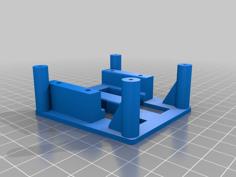
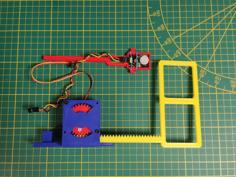
This is a simple robot leg model that uses two cheap servos to simulate a robotic leg that can be used for experiments with kinematics.
I used a pair of basic micro-servos and an Elegoo Nano to drive them.
I have a video of this in action on my YouTube channel.
| Base.stl | 1019.8KB | |
| Link_1.stl | 234.4KB | |
| Link_2.stl | 203.6KB | |
| Support.stl | 2.1MB |