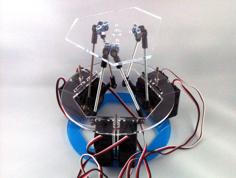
Perhaps one of the funnest projects we have attempted around the .:oomlout:. offices. A five degrees of freedom robotic arm. While we have spent many hours twisting knobs to move pop cans from one point on our desk to another sadly it has not progressed much further.
The main reason for this is the sum total of math knowledge around the oomlout.com offices is about 4 (don't ask us to show our work on how we calculated this) so inverse kinematics is well beyond our reach.
We are releasing it in an imperfect form in the hope that the clever Thingiverse denizens will be able to make it better.
Why this isn't quite ready for sale:
-We lack any inverse kinematics program which makes moving the arm intelligently nearly impossible.
-Without software limits on the servos it is capable of stripping the low cost hobby servo motors (this is alright for testing as they are only five dollars) (we have stripped two in the life of our arm and both happened when we were asking it to do silly things) (this can be fixed by upgrading the servos)
-We haven't completed the 3d model or assembly instructions just yet, but by studying the photos it is possible to assemble. (think more jigsaw puzzle than lego set)
-The gripper, lets just say the gripper needs a little work.
That said it is an amazingly fun toy to play around with, and a good starting point if anyone has ever had a desire to make the perfect robotic arm (it is open source so you'd be free to make and sell your own)
(shameless plug)
For more details about becoming a Robotic Arm Developer visit our blog
(http://www.oomlout.com/blog)
| RARM-Ponoko-2.eps |
| RARM-Ponoko.cdr |
| RARM-Ponoko.svg |