This is my design of Omni Wheel for robotics platform I'm working on (based on Mars Rover).
Omni Wheel as it's name suggest can move in pretty much any direciton. It can roll like a regular wheel forward, but can also slide sideways thanks to small rollers along it's perimeter.
In my case I needed to use omni wheel to overcome "scrub drag" during "skid steering" of 6 wheel platform. Here's a nice and easy to understand article: http://curriculum.vexrobotics.com/curriculum/drivetrain-design/drivetrain-terminology.html
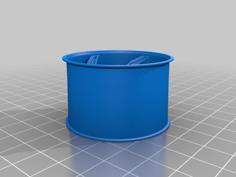
Wheel is about 120mm in diameter and consists of multiple parts most of which can be 3D printed.
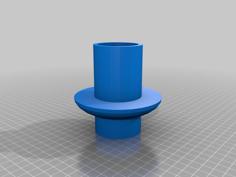
Hub is designed to fit 12mm hex shaft motor couplers (like ones used in "Wild Thumper" 6WD toy).
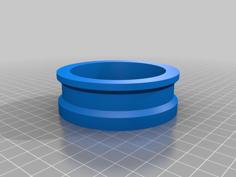
NOTE: rim_w_integrated_hub.stl is upside down, so flip it before printing.
I used PETG to print both Rims and PLA for rollers.
After printing rollers I cleaned up bottom of opening a little with dremel to make sure metal axles are easily rotated inside.
It took about 3.5 hrs for roller to print. Rim with integrated hub 3 hours, other half of rim 2 hours.
Insert axles into a roller and push it into each slot of one half rim. Make sure roller is rotating easily. Place rim cover on top and screw all 9 M3 screws. Plastic seems to hold screws pretty securely, but if you wish you can use longer screws with lock nuts on the ends for ever more secure assembly.
Repeat for second half rim. Insert regular half rim into rim with integrated hub. Rotate so each roller of one half rim is offset (20 degrees) from rollers of the other half rim AND all 6 M4 holes of the inner hub align. Just keep rotating it until you see light shining thru those holes :)
Then use three M4 screws to secure both half rims together. There are 6 holes, but 3 screw are sufficient.
At this point your omni wheel is assembled an can mounted to the motor shaft.
This design is not perfect and has not been tested much. You'll probably get much better results if you can print rollers with flexible filament or add rubber coating. Size of rollers and distance between them is not ideal. Smoother rolling and less resistance can be created if rollers made longer, but I didn't find pre-made stainless dowels of the longer size at a reasonable price. I might re-design this in the future.
Video of wheels in action:
https://youtu.be/BNUZhnwHvlU
| cover.stl | 90.3KB | |
| cover_lasercut.dxf | 5.2KB | |
| omni_roller.stl | 1.2MB | |
| rim.stl | 126.8KB | |
| rim_w_integrated_hub.stl | 180.9KB |