Kinect 360 Object Scanner (WIP, V0.2) 3D Printer Model
The file 'Kinect 360 Object Scanner (WIP, V0.2) 3D Printer Model' is (stl,scad) file type, size is 370.0KB.
The file 'Kinect 360 Object Scanner (WIP, V0.2) 3D Printer Model' is (stl,scad) file type, size is 370.0KB.
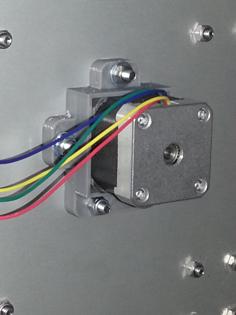
A hangable 3D scanner based on the kinect, arduino, and a stepper motor.
Not working yet, but figured I'd put it up so I could get critiques and suggestions as I work.
The code base is currently in progress, will be borrowing heavily from Kyle McDonald's work for Makerbot, of course. Am sketching it up at the moment, unsure whether I want to do it in Java (very familiar) or Cpp through OF.
v0.2 (files up, not tested or 100%) Defined solution for hub. 4 piece design with bearings.
v0.15 Physical testing and modification of outerJoint and innerJoint. These include adding radial support screws, modified teeth, and refined build methods. The failed code is retained in the build methods with explanation, just for the hell of it.
v0.1 Framework of object and base line openSCAD file. Only parts printed/tested so far are arm joints.
| clampBaseTest1.stl | 479.6KB | |
| clampBearingTest1.stl | 293.1KB | |
| clampTopTest1.stl | 143.6KB | |
| hubBaseTest1.stl | 1.4MB | |
| hubBaseTest1_makerbot.stl | 263.7KB | |
| hubHeadTest1.stl | 93.4KB | |
| innerJointTest2.stl | 1.1MB | |
| kinect_360_v0.15.scad | 12.0KB | |
| kinect_360_v0.2.scad | 20.4KB | |
| outerJointTest2.stl | 2.0MB |