IBoardbot: An OPEN SOURCE Internet Remotely Controlled Drawing Robot 3D Printer Model
The file 'IBoardbot: An OPEN SOURCE Internet Remotely Controlled Drawing Robot 3D Printer Model' is (stl,tif) file type, size is 3.3MB.
The file 'IBoardbot: An OPEN SOURCE Internet Remotely Controlled Drawing Robot 3D Printer Model' is (stl,tif) file type, size is 3.3MB.
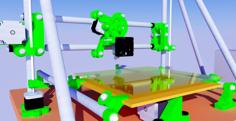
The iBoardbot is an ARDUINO robot connected to the internet capable of writing texts and drawing with great precision. Also, it can erase in a quick and effective way. Send to your iBoardbot your information from any part of the world. As it has a multi-user interface you can also play and challenge your kids, use it as a collaborative notice board or as a twitter wall in your store window.
It can precisely draw what you assign to it. Different users will be able to collaborate with the drawing at the same time from different devices and world places. No matter how far the drawer is; the drawing precision will be as if the drawer himself was holding the pen with his hands
Upload and draw your own graphics using the iBoardbot´s webAPP!
Send any text. The iBoardbot will adjust it to the right size so it can fit on the board and it will draw it using its own font. Just type it and click/tap on SEND
OTHERS:
-3mm wide/100mm long zip ties (~x10)
-5mmØ cable wrap (~90 cms)
-1x Staedtler MARKER (black)
-CLOUD SERVICE subscription
Take a look at this link: http://jjrobots.com/iboardbot-assembly-instructions/
| belt_tensioner.stl | 17.9KB | |
| drawing_HEADER.stl | 470.2KB | |
| DSC_0590.tif | 1.1MB | |
| Electronics_CASE_BOTTOM_v2.stl | 141.7KB | |
| Electronics_CASE_LATERAL_[V3.stl | 66.0KB | |
| Electronics_CASE_TOP_v2.stl | 188.6KB | |
| eraser_v5_fixed.stl | 110.8KB | |
| iBoardBot_belt_support_drawing_header.stl | 106.9KB | |
| iBoardBot_bottom__support_Y-axis.stl | 590.6KB | |
| iBoardBot_marker_support.stl | 348.6KB | |
| iBoardBot_X-axis_carriage_[V2.stl | 507.3KB | |
| Left_and_Right_Legs_[V2.stl | 408.0KB | |
| Pulley_Y_Axis.stl | 105.3KB | |
| top_LEFT_support_FIXED.stl | 5.7MB | |
| top_RIGHT_supportfixed.stl | 624.0KB | |
| X-axis_pulley_V2.stl | 100.0KB | |
| X_motor_ANGLE_support.stl | 197.3KB | |
| y_motor_pulley_42_J2.stl | 313.4KB |