Worm gears find many uses in engineering applications due to their compact size and high gear reduction ratios. A disadvantage of this type of gear set is that only one tooth on the spur gear is engaged (or "in mesh") with the worm gear at any time. This causes high contact stresses which can accelerate wear.
This thing is a demonstration model of a hyperbolic (also known as an enveloping) worm gear. Both the worm gear and the spur gear teeth are cut from hyperbolic surfaces. This allows multiple teeth on the spur gear to engage the worm simultaneously. This reduces the contact stress between the gears, and allows higher torques to be transmitted through the gearset. A video showing the motion of the hyperbolic worm gears is shown here: http://youtu.be/O-MFFjBNCb8.
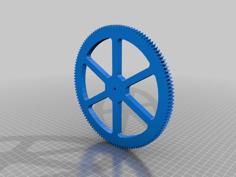
In this design 12 teeth on the spur are theoretically in constant mesh with the worm gear, although manufacturing tolerances result in less-than-perfect contact. The gear reduction is 72:1 (72 revolutions of the worm gear produce one revolution of the spur gear). Both the worm and spur are constructed using true involute gear tooth profiles. The worm gear is horizontally mounted on a pair of knife-edge bearings, and the spur is fastened to a vertical shaft using a c-clip.
This model makes an excellent hands-on demonstration of worm gears for a wide range of students. It can also be used as a challenge: computing and modeling the worm gear geometry is non-obvious. The solidworks files for the worm and spur have been attached for anyone interested.
| base_plain.STL | 4.2MB | |
| bearing_cap.STL | 169.4KB | |
| clip.STL | 743.4KB | |
| hybridbearing.STL | 8.1MB | |
| socket_driver.STL | 811.1KB | |
| spur_involute.SLDPRT | 4.8MB | |
| spur_involute.STL | 2.0MB | |
| worm_involute.SLDPRT | 10.8MB | |
| worm_involute.STL | 4.8MB |