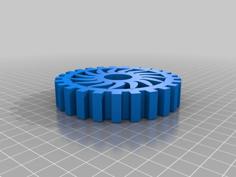
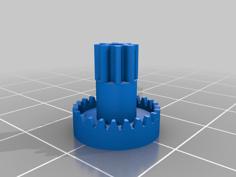
This design is a demonstration of the use of skewed hyperbolic gears. Given a skew angle and distance between a pair of axes, a corresponding pair of hyperbolic shapes can be computed which exhibit line contact with each other. By augmenting these hyperboloids with involute teeth the transmission of torque between the skew axes may be achieved.
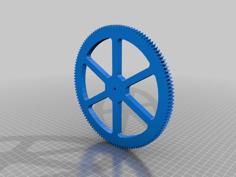
In this design, three smaller hyperbolic gears are in common mesh with a larger fourth gear, in an arrangement commonly known as a "planetary" gearset. This produces a visually exciting object which is a practical demonstration of both simple and advanced principles in the design of geared systems.
I have printed a prototype of this design and found that it functions properly. A little bit of "run-in" is necessary to produce smooth torque transmission, as there is a sliding component to the hyperbolic gear contact. The only colors that I had available to print the prototype were quite ugly, and I would be very happy if someone could produce this design in a pleasing color scheme.
| connecting_rod.STL |
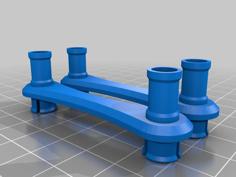
| display_stand.stl |
| hex_key_lrg.STL |
| hex_key_sm.STL |
| skewgear_involute_12_90.stl |
| skewgear_involute_24_90.stl |
| tri_joint.stl |