2x Arm
1x Arm2
1x RightRod
1x Pin_Arm2PristonPartLong
1x Pin_RotaryTablePristonPartShort
1x Base
1x Cap_arm2
1x LeftClaw
1x Pin_BaseSyringeHousing
3x Pin_ClawsRods
1x SyringeHousing_base
1x Plate
1x LeftRod
2x PistonPartShort
1x RightClaw
1x SyringeHousing_arm
1x RotaryTable
1x PistonPartLong
Better works with water than air.
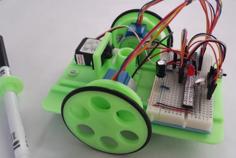
Update: I made also a remote to control the arm.
| Arm.STL | 49.3KB | |
| Arm2.STL | 164.4KB | |
| Base.STL | 151.9KB | |
| Cap_arm2.STL | 74.8KB | |
| Instruction.pdf | 796.6KB | |
| LeftClaw.STL | 39.7KB | |
| LeftRod.STL | 26.7KB | |
| Pin_Arm2PristonPartLong.STL | 75.9KB | |
| Pin_BaseSyringeHousing.STL | 95.7KB | |
| Pin_ClawsRods.STL | 95.8KB | |
| Pin_RotaryTablePristonPartShort.STL | 82.3KB | |
| PistonPartLong.STL | 68.1KB | |
| PistonPartShort.STL | 72.7KB | |
| Plate.STL | 26.7KB | |
| RightClaw.STL | 39.5KB | |
| RightRod.STL | 26.8KB | |
| Robot_Arm.SLDASM | 674.0KB | |
| RotaryTable.STL | 79.9KB | |
| SyringeHousing_arm.STL | 96.8KB | |
| SyringeHousing_base.STL | 41.3KB |