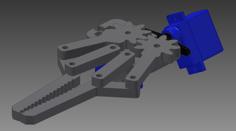
This work was made for an assignment project, with the aim of making a printable "hand" for the industrial robotic arm ABB IRB120. We choose a Festo gripper like design, with easy articulated parts, and exchangeable fingers. It was made in collaboration with
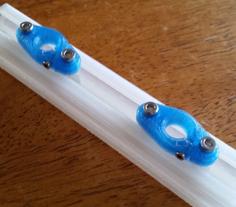
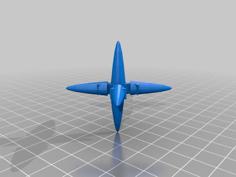
Lab. de Prototipado Electrónico y 3D de FIUNER. The mechanical operational principle is called Fin Ray effect, and it is based on a flexible structure, with rigid crossbeams, that makes the finger bend to the side where the force is applied. I've design the finger with holes on the back for a future addition of extensiometric cells or pressure sensors. It was tested partially, giving acceptable results. However, it still has some flaws and lacks a way to directly feedback its position, like an endstop or an encoder. The connection to the ABB arm is only physical, it must be controlled by an external source. It was designed for coupling a NEMA 17 stepper with single or double stack; impulsed with a threaded rod of 5mm of diameter. I've use the development board EDU-CIAA to control and test it.
Materials needed
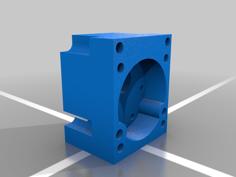
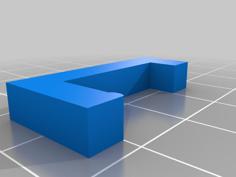
- 1 printing of "base.stl"
- 1 printing of "pusher.stl"
- 3 printing of "fingerbase.stl"
- 3 printing of "flextip.stl". For these I've used TPU filament, but they ended being too flexible with this material; you could try with more rigid material, like PLA or nylon.
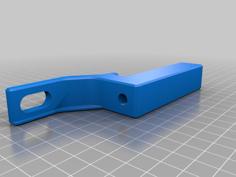
- 3 printing of "holder.stl"
- 1 printing of "abb.stl". This is optional if you are not planning to use mounted on the robot.
- 1 printing of "pusher.stl"
- 4 M5 10mm long screw (for the ABB arm joint).
- 4 M5 10mm diameter washer (for the ABB arm joint).
- At least 28 M3 10mm long screw.
- At least 15cm long 5mm threaded rod (with the option to cut it if it's needed).
- A 5mm to 5mm flexible coupling.
- A stepper NEMA 17 of one or two stacks (and its cables).
- A stepper driver with the enough power to use with the NEMA 17 (like the DRV8825 driver). This could be avoid if you know, and want, to drive directly the stepper coils.
- Anything that could generate a square signal (if you use the driver), from a 555 chip, to a microcontroller board (like an Arduino, or in my case the EDU-CIAA board).
Preparation
To assembly the fingers you will need M3 screws. To open and close the fingers it is needed a 5mm threaded rod attached to the NEMA 17 with a 5mm flexible coupling, similar of those of 3d printers. The threaded rod will pull and push the part named "pusher" with a nut for that rod attached (preferably glued) to that part. The "pusher" goes articulated with the "fingerbases"; these, with the "holders"; and these with the "base", which has the stepper attached. The "abb.stl" part is only needed if you want to place the gripper on the robotic arm. It needs 4 M5 screws 10mm long, with washers.
References
- https://new.abb.com/products/robotics/es/robots-industriales/irb-120
- https://www.frontiersin.org/articles/10.3389/frobt.2016.00070/full