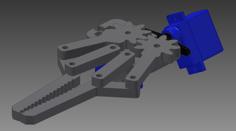
I received a manually operated gripper to repair, which I ended up redesigning to be a bit more robust. I thickened up the areas that seemed to be weak. I retained the same pivot positions and roughly the same gripper length.
The gripper is activated by an eyelet crimped onto a steel wire. For the pivot, I used a 3mm screw, two plain washers and a Nyloc nut. You may alternately use 1/8” components. I re-used the original spring.
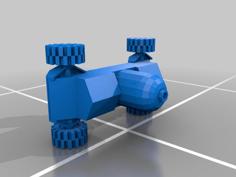
Print the mechanism with at least 25% infill, using supports.
Print the tips in flexible/rubber material with at least 25% infill, no supports. If you can’t print with flexible material, then glue on some rubber (neoprene) strips of around 2mm thick.
For a robotic application, crimp a 3mm (1/8”) electrical eyelet onto a piece of thin steel rope (electrical wire or whatever you can get). Activate the gripper using a reasonably powerful servo motor. You may need to use a return spring.
The gripper was designed in ViaCAD with no post-processing.
| Gripper_v01_mechanism.stl | 3.2MB | |
| Gripper_v01_tip_rev2.stl | 10.0MB |