Flexy-Hand 3D Printer Model
The file 'Flexy-Hand 3D Printer Model' is (stl,zip,pdf) file type, size is 33.2MB.
The file 'Flexy-Hand 3D Printer Model' is (stl,zip,pdf) file type, size is 33.2MB.
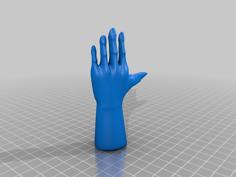
A proof of concept printable hand with "live hinge" flexible joints. Individually activated fingers using Filaflex filament as tendons.
Printed in Makerbot Translucent Red and Filaflex hinges.
Re-mix this idea into your own robotic or prosthetic project.
Video here : http://youtu.be/K8mtqPTJ-Ys
Video review here : http://youtu.be/Z70YWNuOB8E Thanks to 3DUniverse.org and jesimon
Here is an article about the Flexy-Hand on 3DPrint.com
My 1st printed Flexy-Hand (above) is now on display in the iMakr Store, London.
.
EDIT 19/03/2014 : Added an "Opposable Thumb" version of the body.
EDIT 24/09/2014 : Added "Ring Pull.stl" so you can attach to the tendons to make it easier to pull them, see one of the images.
EDIT 16/08.2014 : Added two mounting holes in the base of the Hand for attachment to rigs/arms/boxes etc.
EDIT 29/07/2014 : Increased the tendon hole diameters in the fingers from 2mm to 3mm when printed at full scale. To help printing at smaller scales.
EDIT 16/07/2014 : Put hole in base of finger hinge (7.stl) so that it can be inserted into hand body easier.
EDIT 07/07/2014 : Updated the profile of the base hinges for the fingers (7.stl). This new profile, requires less force to close the fingers, yet it is shaped to better aid finger return.
EDIT 19/05/2014 : Due to Janfigueroa request, added hands (LH/RH) with a more opposable thumb for better grip, print the same fingers for either hand body, The tendons exit the base in this version in a circular pattern instead of a line.
EDIT 06/05/2014 : Two part mould for hinges uploaded from my remix here.
EDIT 02/05/2014 : Right Hand uploaded along with it's fingers.
EDIT 12/03/2014 : After many requests, I have uploaded a STEP file of the hand body (6 - 45deg Thumb Step File.zip)
EDIT 09/03/2014: There has been some confusion regarding how much articulation the fingers have. I have uploaded 3 photos, which show the thumb touching the first two fingers and very close the the ring finger also. I have also uploaded a plate of fingers (yum yum) for anyone who wants to print them all off in one go.
.
http://www.gyrobot.co.uk
http://www.facebook.com/gyrobotuk
| 6_-_45deg_Thumb.stl | 3.9MB | |
| 6_-_45deg_Thumb_RH.stl | 3.9MB | |
| 6_-_45deg_Thumb_Step_File.zip | 15.2MB | |
| 6_-_90deg_Thumb.stl | 2.6MB | |
| 6_-_90deg_Thumb_RH.stl | 2.6MB | |
| 6_-_Opposable_Thumb.stl | 3.9MB | |
| 6_-_Opposable_Thumb_RH.stl | 3.9MB | |
| 7.stl | 21.2KB | |
| 8.stl | 8.9KB | |
| FFX_-_Finger_Hinge_Plate.stl | 181.1KB | |
| Hand.stl | 6.0MB | |
| Hand_-_Drawing.pdf | 204.4KB | |
| LH_1-1.stl | 293.8KB | |
| LH_1-2.stl | 373.9KB | |
| LH_2-1.stl | 321.9KB | |
| LH_2-2.stl | 180.2KB | |
| LH_2-3.stl | 250.4KB | |
| LH_3-1.stl | 267.7KB | |
| LH_3-2.stl | 181.2KB | |
| LH_3-3.stl | 267.0KB | |
| LH_4-1.stl | 257.5KB | |
| LH_4-2.stl | 149.2KB | |
| LH_4-3.stl | 255.5KB | |
| LH_5-1.stl | 260.8KB | |
| LH_5-2.stl | 164.8KB | |
| LH_5-3.stl | 242.6KB | |
| LH_Finger_Plate.stl | 3.4MB | |
| Mould.stl | 97.3KB | |
| RH_1-1.stl | 293.8KB | |
| RH_1-2.stl | 373.9KB | |
| RH_2-1.stl | 321.9KB | |
| RH_2-2.stl | 180.2KB | |
| RH_2-3.stl | 250.4KB | |
| RH_3-1.stl | 267.7KB | |
| RH_3-2.stl | 181.2KB | |
| RH_3-3.stl | 267.0KB | |
| RH_4-1.stl | 257.5KB | |
| RH_4-2.stl | 149.2KB | |
| RH_4-3.stl | 255.5KB | |
| RH_5-1.stl | 260.8KB | |
| RH_5-2.stl | 164.8KB | |
| RH_5-3.stl | 242.6KB | |
| RH_Finger_Plate.stl | 3.4MB | |
| Ring_Pull.stl | 234.0KB |