Experimental 3D Printable Nema 17 Stepper Motor 3D Printer Model
The file 'Experimental 3D Printable Nema 17 Stepper Motor 3D Printer Model' is (stl) file type, size is 432.5KB.
The file 'Experimental 3D Printable Nema 17 Stepper Motor 3D Printer Model' is (stl) file type, size is 432.5KB.
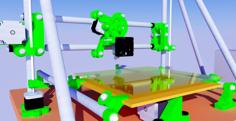
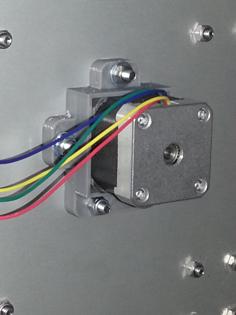
STEPPER MOTOR: This experimental build is my first attempt at making a practical 3D printable stepper motor. The goal was to create a 3D printable stepper motor that could directly replace a Nema 17 stepper motor in a RepRap style 3D printer.
This motor has been demonstrated to work directly with a standard Allegro 4988 bipolar stepper driver in the 12 volt range, and has a native resolution of 240 steps/revolution in the full-step mode. It runs best, however, in the half-step mode, with an effective resolution of 480 steps/revolution. It has the standard Nema 17 hole pattern for M3 machine screws. It cost around $5USD in parts and took 3.25 hours to print. Motor designed by David Hartkop for the Pueblo City-County Library District's Idea Factory makerspace programming.
THE APPROACH: Rather than designing a rotor with high angular resolution, this motor uses a single magnet and four electromagnets. The electromagnets are arranged in diagonal pairs, which are wired in series to provide a total of two coil circuits for the motor. The motor has a native resolution of 4 steps per revolution in the full-step mode. This low resolution stepper motor then drives the input of a split-annulus orbital gearbox, which provides a 60:1 gear reduction. Effort was made to match the impedance of a 0.6W bipolar stepper motor using 33 gage magnet wire. Each of four electromagnets was wound with 75 feet of wire, though exact turns were not considered.
RESULTS: This motor works, but is mostly a curiosity at this point. The torque is suitable for driving a RepRap printer's X or Y stages but the coils were found to easily overheat. I recommend attaching a heat sink to the exposed ends of the four electromagnets.
IDEAS FOR IMPROVEMENT:
| 160222_AllMotorParts.stl | 754.3KB | |
| 160222_BodyBottom.stl | 196.8KB | |
| 160222_BodyMiddle.stl | 151.5KB | |
| 160222_BodyTop.stl | 143.6KB | |
| 160222_OrbitalGears.stl | 54.8KB | |
| 160222_OutputGear.stl | 133.5KB | |
| 160222_Rotor.stl | 74.5KB |