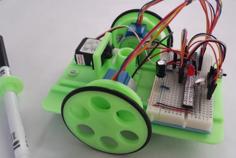
This is a 3D printed robotic Arm.
It follows the success of my previous two designs: EEZYbotARM and EEZYbotARM Mk2
It has the same dimensions of the first one, so it is extremely cheap and fast to print only the main base requires a little bit more time to be printed.
This version was created with the willingness to replace the servo with economic stepper motors, and this is the result.
During development I found the stepper a little weak for the purpose, so I redesigned the transmissions on vertical arms, and apply a modification on stepper from unipolar to bipolar.
As the previous two arms it has been designed without a definite purpose, the aim is educational, providing a suitable hardware that allow to concentrate on exploring all its potential applications.
The making video: EEZYbotARM mk3 - The making
The preliminar tests video: EEZYbotARM MK3 tests
| EBA3_001.STL | 4.1MB | |
| EBA3_002.STL | 5.7MB | |
| EBA3_003.STL | 6.5MB | |
| EBA3_004.STL | 5.4MB | |
| EBA3_005.STL | 646.9KB | |
| EBA3_006.STL | 993.8KB | |
| EBA3_007.STL | 560.7KB | |
| EBA3_008.STL | 954.4KB | |
| EBA3_009.STL | 539.5KB | |
| EBA3_010.STL | 714.0KB | |
| EBA3_010_B.STL | 700.0KB | |
| EBA3_011.STL | 217.6KB | |
| EBA3_012.STL | 1.2MB | |
| EBA3_013.STL | 1.2MB | |
| EBA3_014.STL | 383.9KB | |
| EBA3_015.STL | 42.3KB | |
| EBA3_016.STL | 647.9KB | |
| EBA3_017.STL | 1016.7KB | |
| EBA3_018.STL | 14.3KB |