DIY Self-balancing Robot With Browser Control For Fun 3D Printer Model
The file 'DIY Self-balancing Robot With Browser Control For Fun 3D Printer Model' is (STL) file type, size is 3.1MB.
The file 'DIY Self-balancing Robot With Browser Control For Fun 3D Printer Model' is (STL) file type, size is 3.1MB.
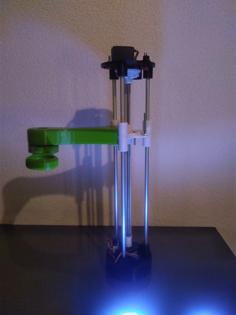
I'd like to present to you my first fully designed robot.
Self-balancing robot for fun is capable of:
Fasteners (length in millimeters):
Assembly (en sub): https://youtu.be/ZRSPSNteWiU
Code: https://github.com/TrashRobotics/BalancingRobot
| base.STL | 421.6KB | |
| crossbar.STL | 86.4KB | |
| display_holder.STL | 60.0KB | |
| display_stand.STL | 184.6KB | |
| hc_sr04_holder.STL | 100.1KB | |
| hc_sr04_stand.STL | 346.6KB | |
| motor_cover.STL | 186.4KB | |
| protective_limiter.STL | 12.2KB | |
| side_cover.STL | 219.5KB | |
| spacer.STL | 5.9KB | |
| top_cover.STL | 126.4KB | |
| wheel.STL | 6.5MB |