Creality Space Pi Automated Lid Mechanism Using NodeMCU And SG90 Servo 3D Printer Model
The file 'Creality Space Pi Automated Lid Mechanism Using NodeMCU And SG90 Servo 3D Printer Model' is (stl,f3d,ino) file type, size is 3.0MB.
The file 'Creality Space Pi Automated Lid Mechanism Using NodeMCU And SG90 Servo 3D Printer Model' is (stl,f3d,ino) file type, size is 3.0MB.
Creality Space Pi Automated Lid Mechanism Using NodeMCU and SG95
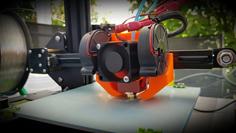
Creality Space Pi is a good filament dryer. However, there is one major flaw similar to some other dryers, it does not vent out the humid air, once the moisture has been extracted from the filament into the enclosed air. This traps humid air inside the dryer, making it hard if not impossible to actually dry a wet filament.
Here is a potentially over engineered solution to lift the lid of the dryer for 10 seconds every 30 mins (adjustable in the included arduino code) in order to vent out any humid air.
Parts
Total cost (aprox $3)
https://www.youtube.com/watch?v=OTm-7Ax17Ls
Wiring:
Optional:
(LED will blink every 10 seconds to let you know the unit is on)
Tips:
Solder the wires to the nodeMCU pins with the wires running up the inside of the pin so the wires run underneath the board up to the servo. There are pockets on the main body STL to allow for the added thickness of a pin with wire soldered to it.
Calibrate to make sure the rack and pinion are well positioned:
Creality Print slicer profiles are included
| case.stl | 1.6MB | |
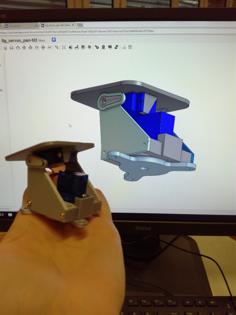
| fusion360.f3d | 676.9KB | |
| motor-bracket.stl | 292.9KB | |
| Pinion_Gear.stl | 129.1KB | |
| piOpenerNodeMcuCode.ino | 1.6KB | |
| Pusher.stl | 148.2KB | |
| pusher_cap.stl | 341.7KB | |
| space_pi_base_2_v24.f3d | 1.3MB |