I tried to design something that was ridged, durable and light. So far its taken a few pretty heavy crashes into concrete with no noticeable damage. This is my 3rd design and the one I am most happy with. Flight characteristics are great with very snappy cornering and good recovery from diving.
It has a 20 degree camera tilt which I find is perfect for these micros. If you're a new pilot this might be a little high but I find the wide viewing angle of these cams make the tilt less of an issue for new pilots.
Weight is 40g dead on. That is including a micro rx that I needed for my transmitter, newer flight controllers have onboard rx's that should bring the total weight down significantly. Wheelbase is 90mm.
I've also added a buzzer. I learned the hard way that leaving them off to save weight is a terrible idea if you plan on flying outdoors.
I've printed in pla, the only filament by cheep printer can handle. Abs might be a better option. I'd appreciate the feedback if you try it.
Parts list:
flight controller: spracing evo brushed
Motors: 8520 coreless
Camera: Not sure, its a standard micro cam vtx combo job. Any should fit no problem.
Props: Ladybirds
Buzzer: 5v buzzer
Misc: Foam tape for mounting the fc, rubber-bands
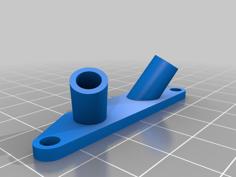
Build should be straightforward. Just use my photos for reference.
I highly recommend flashing the latest version of betaflight onto your flight controller. Instructions are a google away.
PIDS for bataflight:
These are the ones I found for the qx90 micro quad that is also a 90mm x frame. They seem to work very well.
p_pitch = 80
i_pitch = 45
d_pitch = 20
p_roll = 80
i_roll = 45
d_roll = 20
p_yaw = 75
i_yaw = 45
Credit to NJ tech for those
Updated for a bit more strength. Added about a gram of weight
EDIT
I've added a wip design that should be an improvement. Not fully tested yet. I'll keep uploading as the design changes
| 90rd_v2.stl | 157.5KB | |
| beefed90rd.stl | 218.0KB |