Brunel Hand 2.0 3D Printer Model
The file 'Brunel Hand 2.0 3D Printer Model' is (stl,pdf) file type, size is 78.0MB.
The file 'Brunel Hand 2.0 3D Printer Model' is (stl,pdf) file type, size is 78.0MB.
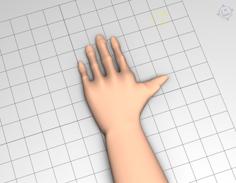
The Brunel Hand 2.0 is an advanced, lightweight and precise robotic hand for researchers. With a low cost and open source design, this fully articulated device is primed to revolutionise the future of robotics research.
All over the world, university researchers and roboticists are using the Brunel Hand 2.0. It has nine degrees of freedom, four degrees of articulation, and can be programmed using the Arduino programming environment.
The Brunel Hand 2.0 is compatible with robot arms and perfect for anyone doing a project with robotic hands or wants a neat, light, and functional robotic hand for use with a humanoid robot. It's an excellent platform for research into prosthetics, object grasping and many human-robot-interaction applications.
3D Printed Components:
All of the components required for a right hand start with 'RH' and the components for a left hand start with 'LH'. Assembly instructions are available in 'Thing Files'.
Non-3D Printed Components:
This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License.
| Brunel_Finger_Mould_Base_Plate.stl | 265.9KB | |
| Brunel_Finger_Mould_Main_Body.stl | 4.4MB | |
| Brunel_Finger_Mould_Plunger.stl | 1.3MB | |
| Brunel_Finger_Mould_Top_Plate.stl | 367.5KB | |
| Brunel_Hand_2.0_-_Assembly_Guide.pdf | 10.0MB | |
| LH_1ST_Finger_Distal.stl | 2.4MB | |
| LH_1ST_Finger_Proximal.stl | 1.8MB | |
| LH_1ST_Finger_Topcover_Distal.stl | 583.8KB | |
| LH_1ST_Finger_Topcover_Proximal.stl | 531.6KB | |
| LH_2ND_Finger_Distal.stl | 2.4MB | |
| LH_2ND_Finger_Proximal.stl | 1.8MB | |
| LH_2ND_Finger_TopCover_Distal.stl | 586.4KB | |
| LH_2ND_Finger_TopCover_Proximal.stl | 533.7KB | |
| LH_3RD_Finger_Distal.stl | 2.3MB | |
| LH_3RD_Finger_Proximal.stl | 1.5MB | |
| LH_3RD_Finger_TopCover_Distal.stl | 611.7KB | |
| LH_3RD_Finger_TopCover_Proximal.stl | 530.5KB | |
| LH_4TH_Finger_Distal.stl | 2.2MB | |
| LH_4TH_Finger_Proximal.stl | 1.5MB | |
| LH_4TH_Finger_TopCover_Distal.stl | 594.0KB | |
| LH_4TH_Finger_TopCover_Proximal.stl | 525.0KB | |
| LH_Back_Cover.stl | 2.7MB | |
| LH_Cable_Tidy.stl | 9.4KB | |
| LH_Finger_Ligament.stl | 8.1MB | |
| LH_Finger_Ligament_Cover.stl | 449.1KB | |
| LH_Motor_Cover.stl | 573.8KB | |
| LH_Palm.stl | 5.6MB | |
| LH_Palm_Mould_Base_Plate.stl | 5.5MB | |
| LH_Palm_Mould_Main_Body.stl | 5.3MB | |
| LH_Palm_Mould_Plunger.stl | 12.1MB | |
| LH_Palm_Mould_Top_Plate.stl | 405.4KB | |
| LH_PQ12_End_Cap.stl | 350.7KB | |
| LH_Stand.stl | 4.0MB | |
| LH_Stand_Connector_Block.stl | 72.2KB | |
| LH_Stand_Grip_Band.stl | 4.9MB | |
| LH_Thumb.stl | 2.8MB | |
| LH_Thumb_Ligament.stl | 39.9KB | |
| LH_Thumb_Ligament_Clamp.stl | 85.7KB | |
| LH_Thumb_Ligament_Cover.stl | 217.8KB | |
| LH_Thumb_Mould_Base_Plate.stl | 415.5KB | |
| LH_Thumb_Mould_Main_Body.stl | 1.5MB | |
| LH_Thumb_Mould_Plunger.stl | 2.3MB | |
| LH_Thumb_Mould_Top_Plate.stl | 887.6KB | |
| LH_Thumb_Top_Cover.stl | 295.3KB | |
| RH_1ST_Finger_Distal.stl | 2.4MB | |
| RH_1ST_Finger_Proximal.stl | 1.8MB | |
| RH_1ST_Finger_Topcover_Distal.stl | 583.8KB | |
| RH_1ST_Finger_Topcover_Proximal.stl | 531.6KB | |
| RH_2ND_Finger_Distal.stl | 2.4MB | |
| RH_2ND_Finger_Proximal.stl | 1.8MB | |
| RH_2ND_Finger_TopCover_Distal.stl | 586.4KB | |
| RH_2ND_Finger_TopCover_Proximal.stl | 533.7KB | |
| RH_3RD_Finger_Distal.stl | 2.3MB | |
| RH_3RD_Finger_Proximal.stl | 1.5MB | |
| RH_3RD_Finger_TopCover_Distal.stl | 611.7KB | |
| RH_3RD_Finger_TopCover_Proximal.stl | 530.5KB | |
| RH_4TH_Finger_Distal.stl | 2.2MB | |
| RH_4TH_Finger_Proximal.stl | 1.5MB | |
| RH_4TH_Finger_TopCover_Distal.stl | 594.0KB | |
| RH_4TH_Finger_TopCover_Proximal.stl | 525.0KB | |
| RH_Back_Cover.stl | 2.7MB | |
| RH_Cable_Tidy.stl | 9.4KB | |
| RH_Finger_Ligament.stl | 8.1MB | |
| RH_Finger_Ligament_Cover.stl | 449.1KB | |
| RH_Motor_Cover.stl | 561.7KB | |
| RH_Palm.stl | 5.6MB | |
| RH_Palm_Mould_Base_Plate.stl | 5.5MB | |
| RH_Palm_Mould_Main_Body.stl | 5.4MB | |
| RH_Palm_Mould_Plunger.stl | 12.1MB | |
| RH_Palm_Mould_Top_Plate.stl | 441.6KB | |
| RH_PQ12_End_Cap.stl | 350.7KB | |
| RH_Stand.stl | 4.0MB | |
| RH_Stand_Connector_Block.stl | 72.2KB | |
| RH_Stand_Grip_Band.stl | 4.9MB | |
| RH_Thumb.stl | 2.8MB | |
| RH_Thumb_Ligament.stl | 39.9KB | |
| RH_Thumb_Ligament_Clamp.stl | 85.7KB | |
| RH_Thumb_Ligament_Cover.stl | 217.8KB | |
| RH_Thumb_Mould_Base_Plate.stl | 451.8KB | |
| RH_Thumb_Mould_Main_Body.stl | 1.6MB | |
| RH_Thumb_Mould_Plunger.stl | 2.3MB | |
| RH_Thumb_Mould_Top_Plate.stl | 924.3KB | |
| RH_Thumb_Top_Cover.stl | 295.3KB |