Start a new project merging several skills in one task. This is my tank track robot controlled by a Raspberry Pi using a webservice. You can control the robot over dynamic website with webcam view. The RSPI also provides RPI-Wireless-Hotspot, so it is possible to connect directly with your smartphone.
An Arduino-Micro communicates to the RSPI over I2C and controls 8 servos. Also a battery state monitor is implemented. I decide to use standard AA Accus for powering with 2 rows a 5x 1,2 volt. A step-up/ step-down switching voltage regulator guaranteed 5 volt supply despite low battery.
See latest video on: https://www.youtube.com/watch?v=D2brukbh378
Updates:
03/12/18: Due to frequent questions: the servo is a MODELCRAFT BMS-410C. You can buy this in Europe at Conrad (https://www.conrad.de/de/modelcraft-standard-servo-bms-410c-analog-servo-getriebe-material-kunststoff-stecksystem-jr-404753.html). The servo is therefore interesting, because he has a receptacle for the axle in the rear housing insinde !
01/04/16: After a long break, I return to the project again. The Raspberry Pi 3B has now integrated Bluetooth and FiFi which means it has more performance and i can remove the "Ampere-eating" WiFi-Stick. Also checking the use of adressable digital servos or selfmade Digital2PWM-Adaptor for serial (BUS) connection. My intention is reducing the amount of cable to the arm.
07/07/15: Project goes on. Currently, the main problem is the power, respectively the duration of the battery power supply. 1 camera, 8 servos, 2 controller, web service, and Wi-Fi hotspot consume a total of 2.5 amperes. Maybe I wanted to solve too much at once :-((
My aim is: Remote-controlled robot with camera. Looking for an alternative video transmission system without web service
02/26/15: Add Tank-Track for 1.75mm Filament rod.
02/05/15: Software implemented. RSP used as WLAN Hotspot with Webserver -> communicates to Arduino over serial - Arduino over I2C to PCA9685. RSPI won't work in Multislave I2C Mode :-((
01/21/15: Fault in the electrical circuit improved. MOSFET got too little voltage on UGS -> reduced resistance
01/20/15: Build new Battery-Pack for more current available. Using 16 x AA á 6V (4 x 4 pack)
01/19/15: Implements PCA9685. Works fine! First trial without RSP for verfication of trigonometric calculation on Arduino.
01/08/15: First trial completed. Built a experimental arrangement with a old joystick and a second Arduino-Micro which simulates the RSPI-I2C communication (see image). ARGHH! Huge twitching of the servos because Arduino is overloaded with I2C and 8 servos! Special servo driver ordered (Adafruits-PCA9685) to save Arduino-Performance.
01/06/15: Add layout extension board preview. Not checked if all works - release of eagle file after validation by function.
12/28/14: Laser pointer moved to the middle of the gripper - now i can point to the thing i want to grip exactly.
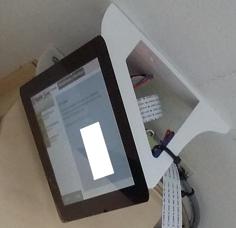
-Change cam to a RSPI-Wide-Angle Cam. In fact this camera is much lighter than the first one!
-Change arm wiring! Because of problems with bending and buckling the wires between the servos i decide to route them on the side which made it necessary to implement the cam to the other side. So add 2 additional cable guides. (see new images)
12/21/14: The chassis is wide enough now.It is not necessary to desolder the cinch video connector.
This is a work-in-progress project and wil bee updated regularly ;-)
| Arm.stl | 443.8KB | |
| BatteryPack_end.stl | 200.1KB | |
| BatteryPack_middle.stl | 323.1KB | |
| CableGuide2.stl | 458.4KB | |
| CableRedirect1.stl | 1.3MB | |
| CableRedirect2.stl | 20.0KB | |
| Cam2Base.stl | 145.6KB | |
| Cam2Cover.stl | 622.4KB | |
| Cam2Mount.stl | 110.4KB | |
| CamHousing.stl | 748.1KB | |
| CamMount.stl | 220.9KB | |
| Chassis2.stl | 274.0KB | |
| GripperBase.stl | 118.6KB | |
| GripperDriveLeft.stl | 103.8KB | |
| GripperDriveRight.stl | 99.0KB | |
| GripperGuidance.stl | 68.5KB | |
| GripperJaw.stl | 137.2KB | |
| GripperLid.stl | 141.6KB | |
| Track.stl | 146.8KB | |
| TrackConstruct.dxf | 102.6KB | |
| Track_1_75.stl | 823.2KB | |
| TurnTable.stl | 103.8KB | |
| TurnTableBase.stl | 273.2KB | |
| Wheel.stl | 317.0KB |