After seeing a couple really cool examples of "four degrees of freedom" biped out there, I decided that I would make some cool feet and make the robots a bit more creature-like. Current ideas for cool feet are beasty feet, mech-like feet, rock feet.. you know.
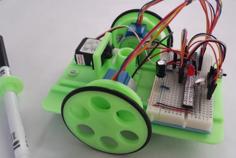
The preceding examples of this type of robot used the pcb as the mounting point for the servos, and I've made a generic baseplate with room for a mini breadboard or your own preferred platform. I've also added a "neck" servo for looking around and ultrasonic sensor for sight. I plan to make a housing and more creature feet for this as there is much potential for customization.
The code I'm using is a derivation of the functions and primitives written for uBipedino (tm) by user Ro-Bot-X on the Let's Make Robots site. It is the part of the robot that is in progress, as I am working to fine tune the ultrasonics.
The link to Ro-bot-X's wonderful creation is here: http://letsmakerobots.com/node/30394
Arduped's home is at: www.handmadecircuits.com
Here is a video with some tips and tricks for assembly:
https://vimeo.com/42201765
...and here is a video showing Aduped's first steps!
| Biped_Base.stl | 97.0KB | |
| Biped_Brackets.stl | 146.3KB | |
| Biped_puffyfeetv3.stl | 878.8KB | |
| PuffyLeftFoot.stl | 443.9KB | |
| PuffyRightFoot.stl | 438.2KB | |
| Sensor_Bracket.stl | 90.6KB |