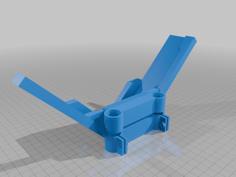
Anycubic Kobra Neo Upgraded Z Axis Stepper Motor Mount (with Axial Thrust Bearing) 3D Printer Model
The file 'Anycubic Kobra Neo Upgraded Z Axis Stepper Motor Mount (with Axial Thrust Bearing) 3D Printer Model' is (stl) file type, size is 152.1KB.
The file 'Anycubic Kobra Neo Upgraded Z Axis Stepper Motor Mount (with Axial Thrust Bearing) 3D Printer Model' is (stl) file type, size is 152.1KB.
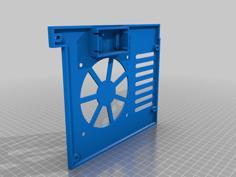
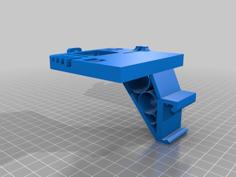
The stock Z-Axis stepper motor mount used in the Anycubic Kobra Neo has a few flaws:
This model fixes those issues and also adds an option of mounting a F5-10M 5x10x4mm axial thrust bearing, which eliminates backlash of the stepper motor shaft.
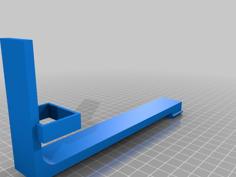
The model is intended to be used with an oldham coupling and a Z axis lead screw stabilizer (https://www.thingiverse.com/thing:6286799) and works great in a belt synced dual Z-axis configuration (with added F8-16M 8x16x5mm axial thrust bearings): https://www.printables.com/model/462038-anycubic-kobra-go-dual-z-mod-with-timing-belt
The model re-uses the original bolts, but you will need to supply two extra M3 screws and a F5-10M 5x10x4mm axial thrust bearing: https://www.aliexpress.com/item/1005003201799499.html?spm=a2g0o.order_detail.order_detail_item.5.6e30f19cSoRwax
I also left additional space for a 7mm steel bearing ball to be dropped inside (it sits between the stepper motor shaft and the lead screw), this further minimizes backlash.
Do not use a flexible stepper motor shaft coupling together with an oldham coupling and lead screw stabilizer! The stock rigid coupling works the best, and make sure it rests completely on the axial thrust bearing. For the oldham coupling to do it's job, it's essential that the lead screw is fixed rigidly (while being straight, aligned, with no binding) both at the top and bottom.
| Anycubic_Kobra_Neo_Upgraded_Z_Axis_Stepper_Motor_Mount.stl | 540.7KB |